¿Que es el COSIMIR y como lo instalamos?
El Cosimir es un simulador de robots, una plataforma donde podemos realizar los movimientos que ejerce un robot. Con respecto a los parámetros X,Y,Z.
Este es un programa solo para simular virtualmente, no es utilizados prácticamente. Ya para trabajar con robots reales se utilizan otros tipos de programa, dependiendo sus fabricantes. Pero este sí que tiene las funciones que todos.
Continuación veremos los pasos para instalar el Cosimir.
Primero instalamos el programa y los ejecutamos, seguimos todas las instruccines correspondiente.

Una vez ya abierto nos abrirá la siguiente ventana, donde nos muestra los detalles del fabricante, le damos a ok.

Luego vamos a la pestaña de arriba donde dice File, y pinchamos con doble click en Proyect Wizard.
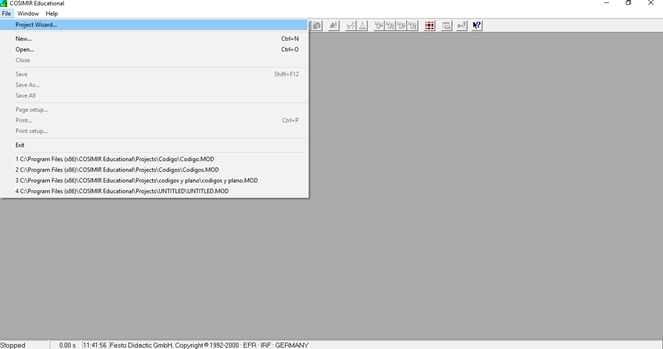
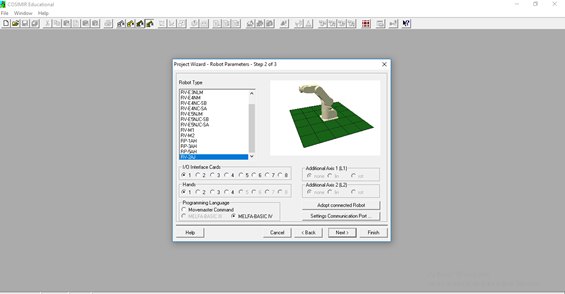
Se nos abrirá una ventana como la siguiente, son los tipos de robots que podemos trabajar. Además, aparecen las condiciones que le podemos dar. Lo más recomendable es trabajar con el ultimo de la lista, luego le damos a Finish.
Luego se nos aparece las siguiente pagina con esas 4 ventanas, cada una con una función distinta. Esta es la pagina principal donde vamos a trabajar.
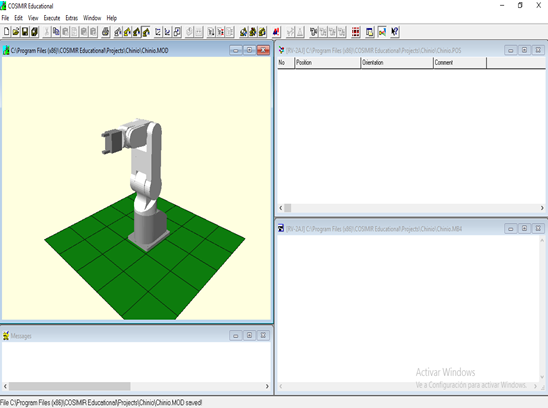
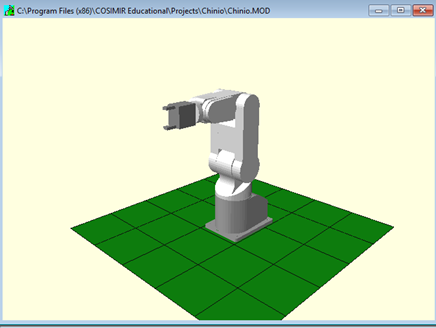
En la siguiente ventana podremos ver la posición actual en que se encuentra el robot y donde se va a simular el funcionamiento de este mismo.
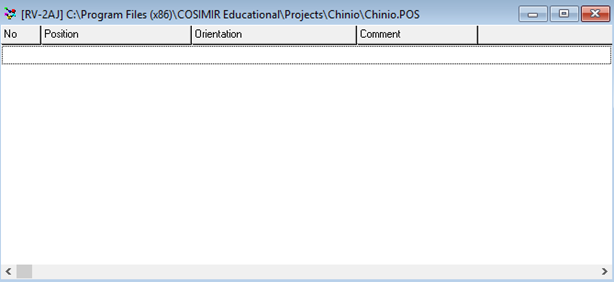
En esta ventana le damos la coordenada con respecto a las posiciones que queremos conseguir del robot.
En esta próxima ventana es donde vamos a editar el programa, donde vamos a realizar los comando y movimiento que debe hacer este.
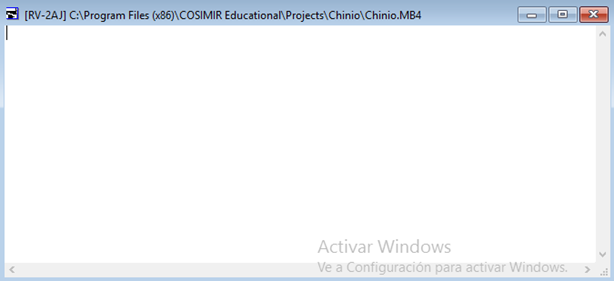
La próxima ventana es la de mensaje, donde el programa nos muestra los posibles errores que este puede presentar y las funciones que ese está realizando.

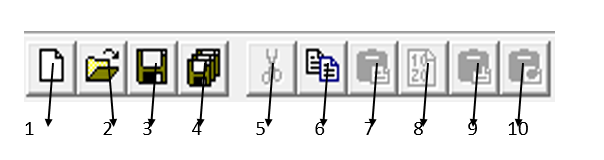
- Nuevo
- Abrir
- Guardar
- Guardar como
- Cortar
- Copiar
- Pegar
- Renombrar
- Insertar posición
- Aceptar posición
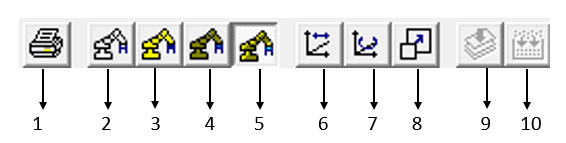
- Imprimir: esta función no es válida en este programa
- Mostrar el robot en modo gráfico
- Mostrar el robot con color claro
- Mostrar el robot con color oscuro
- Mostrar el robot en forma normal
- Mover: esta sirve para mover la posición del robot dentro de la ventana
- Acercar, Alejar: sirve solo para dentro de la ventana
- Compilar
- Compilar vinculo

- Iniciar
- Siguiente Medida
- Medida Previa
- Modo Explorador
- Modo Editar
- Modo Librería
- Detención de Colisión
- Trayectoria de Superficie
- Cámara Navegadora
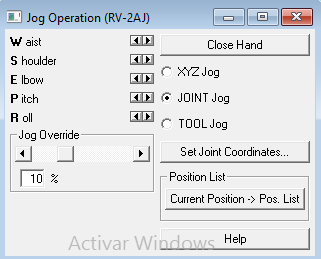
- La próxima de ventana es TEACH-IN.
El Teach-In sirve para mover el brazo robótico a tú antojo con diferentes formas de movimiento que a continuación se te explican.
Para obtener el Teach-In se pondrá el cursor en la barra de menú extras, dar un clic e
ir a la opción Teach-In o presionar directamente por el teclado la tecla F8.
upvoted please follow me and upvote my post if you like it
https://steemit.com/money/@vegeto/why-uber-is-a-scam
Buena información. Esto es lo que usan los estudiantes de mecatronica?
De robotica y automatización, gracias! Upvote plz
Congratulations @jael.acevedo! You received a personal award!
You can view your badges on your Steem Board and compare to others on the Steem Ranking
Do not miss the last post from @steemitboard:
Vote for @Steemitboard as a witness to get one more award and increased upvotes!