SISTEMI, MODELLI E METODI DI CONTROLLO
Il progetto @discovery-it ha subito un'amara interruzione nella giornata di ieri. Per alcune settimane ha sfornato tematiche curiose e piacevoli da approfondire: poco tempo fa ha proposto come argomento L'alba dei robot. Ripensando ai miei trascorsi universitari in cui sono stato collega di Ingegneri Informatici e Meccanici ho voluto rispolverare le mie nozioni in merito, cercando di non condividere un contributo troppo dettagliato e noioso, ma cercando di fornire informazioni superficiali sull'argomento. Cercherò di descrivere quindi quale sia il sistema che regola i robot e durante tutto il post porterò esempi anche pratici (prendendo come esempio un drone, un "robot familiare" per chiunque).
Buona lettura!
SISTEMI
Partiamo per prima cosa dalla definizione scientifica del termine:
Nell’ambito scientifico, qualsiasi oggetto di studio che, pur essendo costituito da diversi elementi reciprocamente interconnessi e interagenti tra loro o con l’ambiente esterno, reagisce o evolve come un tutto, con proprie leggi generali.1
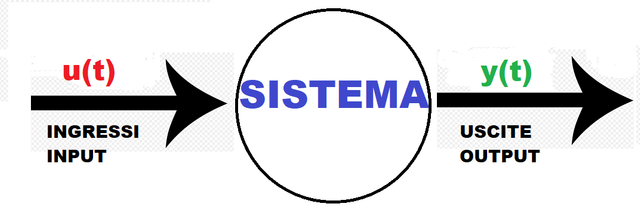
Nell'ambito dell'automazione il concetto di sistema è un insieme di componenti chiusi in un modelli fisso che subisce interventi da elementi in entrata (input) e genera elementi in uscita (output). Questi sistemi in un'idea più settoriale prendono il nome di SISTEMI DINAMICI2.
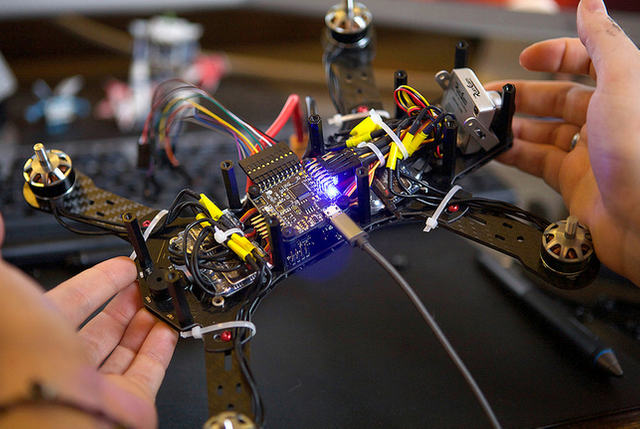
Per capirci possiamo definire un sistema dinamico un drone o un qualsiasi robot che riceve input (comandi) e restituisce output (reazioni).

CC2 Creative Commons
Ricordo a tutti coloro a cui piaccioni i droni che @bafi sta seguendo il progetto Aerial-Italy proprio su di essi
Il termine "dinamico" rende perfettamente l'idea di come questi sistemi siano in continua evoluzione nel tempo e non siano invece STATICI. Si crea quindi una netta distinzione tra sistema statico e dinamico:
STATICO: sistema nel quale un'uscita y(t) dipende solo da un ingresso u(t) per ogni istante di tempo t (per la stessa entrata corrisponde una ed una sola uscita istantanea);

DINAMICO: questo concetto risulta essere più complesso del precedente, in quanto l'uscita y(t) ha un diretto legame con lo storico degli input generati da un u(t) (con t>t0); se ne deduce quindi che il sistema come strumento di calcolo concentra l'apprendimento passato in un'evoluzione generata da tutta la storia degli ingressi.
SISTEMI DINAMICI
Lo studio quindi dei sistemi dinamici deriva dalla volontà di costruire un modello matematico capace di descrivere il variare nel tempo dell'intero sistema, motivando ogni rilevazione con opportune leggi che possano spiegare il presente, basandosi sul passato per anticipare il futuro.
Freccia
CC0 Creative Commons
sono le variabili indipendenti (cause) e possono essere ingressi di controllo (uc) che il sistema conosce e quindi può modificare e manipolare arbitrariamente) [per esempio nel caso del drone il semplice movimento della levetta del pad è un ingresso di controllo];
oppure possono essere ingressi di disturbo (ud): in questo caso il sistema statico non riuscirebbe a riconoscerli, mentre uno dinamico può imparare a riconoscerli, ma non può manipolarli o controllarli [nel caso del drone potrebbero essere un disturbo (rumore) generato da un campo elettromagnetico] e rappresentano le incognite del sistema.
sono le variabili dipendenti (effetti), visto che sono la diretta conseguenza degli ingressi, e sono definite come uscite di controllo (yc), alle quali si impone un determinato tipo di comportamento e di reazione [nel drone sono il movimento del drone in seguito al comando ricevuto con il movimento della leva del pad];
ci sono poi le uscite di misurate (ym) che servono esclusivamente a raccogliere dati sul sistema e sulle uscite controllate.
Lo STATO è il concetto che ci aiuta a determinare la situazione ci un sistema al tempo t' come conseguenza dell'insieme delle variabili il cui valore è neccessario per determinare in modo univoco l'andamento delle uscite y(t) sulla base delle conoscenze degli ingressi *u(t) (per t>t').
Nel drone in volo lo stato è rappresentato da moltissime variabili: la posizione nello spazio aereo, la distanza dal sistema di comando, l'intensità del segnale, i rumori che disturbano il segnale, lo stato della batteria...
CONTROLLI AUTOMATICI E METODI
L'obiettivo ingegneristico è quindi quello di ottenere, attraverso uno studio approfondito, delle uscite determinate: si punta quindi inizialmente ad avere variabili di riferimento in output (yd(t)), in stretto legame on le variabili controllate.
Si avvia quindi un nuovo sistema, detto SISTEMA DI CONTROLLO3 che ha come ultimo scopo quello di determinare per ogni istante t l'ingresso di controllo u(t), in modo tale che l'output y(t) sia sufficientemente (all'interno di una certa tolleranza) vicino a yd(t), per ogni comportamento ammissibile dei disturbi.
Esistono essenzialmente due tipi di sistemi di controllo che elaborano con metodi diversi le informazioni a disposizione; in entrambi i casi si parla di controllo ad anello, in quanto il check viene lanciato, elabora i dati e fornisce le risposte:
In questo caso la tecnica è quella di cercare di prevedere la scelta di un valore delle variabili di controllo u(t) sulla base delle variabili di uscita di riferimento yd(t).
Qui gli studi mirano a portare avanti un processo che determina a priori il valore degli input di controllo u(t) sulla base degli output di riferimento yd(t).
MODELLI MATEMATICI
Quanto abbiamo detto fino ad ora è ovviamente la spiegazione tecnica e teorica di quanto avvenga a livello pratico all'interno del sistema. Tutti i nomi e le nozioni poi in ambito scientifico diventano numeri e variabili. In particolar modo il sistema dinamico viene descritto attraverso un modello lineare stazionario. Partiamo da analizzare questi due concetti: l'attributo lineare conferisce al sistema la capacità di riuscire a sovrapporre più effetti contemporaneamente l'uno a l'altro; si parla di stazionario nel caso in cui il sistema risulti invariante nel tempo, cioè attraverso traslazioni temporali. Attenzione però: stazionario non significa che il sistema non vari nel tempo (altrimenti ci troveremmo nella situazione si sistema continuo descritto inizialente), ma che rimane invariato in determinati intervalli di tempo durante i quali l'intero processo si ripete nello stesso modo a come si è generato nell'intervallo precedente.4
E' importante precisare che lineare e stazionario hanno anche i rispettivi aspetti opposti che sono non-lineare e non-stazionario.
Facciamo una precisazione: ho parlato precedentemente di modello e di sistema, ma è importante precisare che modello e sistema non sono la stessa cosa. Infatti il primo è la rappresentazione numerica del secondo, in cui per mezzo di una funzione (relazione funzionale) tra gli ingressi e le uscite si descrive il sistema.
E' fondamentale l'impiego di un modello matematico che ci permetta di mettere su carta concetti: spesso gli ingegneri Informatici e Meccanici fanno uso di questo sitema in fase di progettazione (quando non esiste ancora niente se si escludono idee ed ipotesi) e quando fare esperimenti pratici potrebbe essere troppo costoso o rischioso (pensiamo alle spedizioni spaziali su Marte).
CC2 Creative Commons
Se ne deduce quindi che se il modello matematico risultasse particolarmente accurato ed allo stesso tempo complesso, molto probabilmente anche il sistema che ne deriverebbe risulterebbe altrettanto efficace. Per quanto riguarda invece l'efficienza avremmo bisogno di uno step ulteriori, in cui invece sistema e modello lavorano parallelamente: si opererebbe quindi in un processo di miglioria (mentre il precedente era essenzialmente una fase di messa in pratica).
Il ruolo quindi del modello matematico rappresenta una fase importante nella realizzazione di un sistema automatizzato.
STABILITA' DI UN SISTEMA
Scendendo maggiormente nell'analisi dei sistemi che regolano il comportamento di strumentazioni automatizzate, è importante soffermarsi anche sul concetto di stabilità: questo aspetto rappresenta in un sistema fisico (come potrebbe essere appunto un drone) la capacità di recuperare in brevi intervalli di tempo lo stato iniziale nel caso in cui l'intero sistema sia stato affetto da una perturbazione esterna (il rumore o comunque anche più in generale gli ingressi di disturbo). Ovviamente questo tipo di perturbazioni devono essere limitate nel tempo e nell'intensità: per capirci, nel nostro esempio del drone un disturbo potrebbe essere causato da una folata di vento, dopo la quale il robot deve recuperare l'equilibrio attraverso un bilanciamento; deve quindi percepire l'ingresso di disturbo (meglio se lo riconosce, non tanto come vento, ma come forza che lo sposta) e reagire in tempi rapidi. Si pensi infatti se il drone si trovasse in una situazione a rischio urto e la folata di vento lo spostasse causando l'urto con elementi solidi che lo circondano: il tempo di reazione e di "contrasto" sarebbe fondamentaleavvenisse in tempi molto brevi.5
Bibliografia
1 Definizione Treccani di "Sistema" (scientifico)
2 Sistemi dinamici
3 Controlli automatici per la meccatronica
4 Proprietà dei Sistemi lineari stazionari
5 Stabilità nei sistemi di controllo

Banner di ItaSTEM
Maggiori informazioni sul discord ufficiale di @itastem
Concludo il post con il grande augurio che @discovery-it possa tornare ad essere una delle rubriche principe della comunità italiana e non solo. Colgo l'occasione per ringraziare anche il costante @bhuz che ha sempre sostenuto questo progetto.
Posted using Partiko Android
Magnifico. Complimenti davvero @moncia90, in un solo post sei riuscito a racchiudere uno studio lunghissimo che richiederebbe settimane per comprendere nei minimi particolari ma che tu hai saputo sintetizzare efficacemente. Bravissimo. Sento un po nostalgia dell'esame di sistemi e di teoria dei segnali.
Grazie mille Paolo!\n@discovery-it era anche questo, con le sue capacità di inspirare idee e ricordi. Anche la semplice lettura spesso porta a tutto ciò.\nGrazie del felice commento!👍
Posted using Partiko Android
Non posso dire di avere capito tutto quanto quello che ho letto, ma ritengo che quel poco o molto che ho effettivamente compreso sia stato dovuto al fatto dell'ottima struttura e grado di comprensione che possiede il tuo post, caro @moncia90, complimenti per questo corposo e curatissimo lavoro, ottimo sotto tutti i punti di vista
Grazie Mad!\nHo cercato di intervallare parti tecniche a parti piú leggibili da chiunque con i vari esempi del drone. La tua presenza sotto i miei post sta diventando un piacevole costante e ciò mi rende molto felice, in particolar modo del tuo supporto morale!\nGrazie ancora!👍
Posted using Partiko Android
Seguirti e in un certo senso sostenerti è una questione di logica, perché la tua poliedricità è assolutamente fuori discussione, per cui onore al merito, un ulteriore apprezzamento perché riesci a fare tutto con lo smart e partiko, bravissimo
Lo smartphone è il prolungamento della mia mano: ormai faccio tutto con quest'oggetto, escluso scrivere i post, che salvo su Google drive e poi li ritrovo direttamente sul cellulare ed attraverso un copia e incolla li posto attraverso Partiko
Posted using Partiko Android
Ehhh, la famosa marcia in più che ha la tua generazione rispetto alla mia....
This post has been voted on by the SteemSTEM curation team and voting trail in collaboration with @curie.
If you appreciate the work we are doing then consider voting both projects for witness by selecting stem.witness and curie!
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!