L’ANGOLO DELLA FISICA – MECCANICA: MOTI RELATIVI (ep.4)
INTRODUZIONE
Torno sul treno.
Ore ed ore di lunghi viaggi.

CC3 Creative Commons
{kind=link}
Per trascorrere più piacevolmente il tempo leggo e scrivo, ma non mi vergogno nel dire che spesso la noia mi porti a distrarmi con poco: un bambino che gioca con una pallina di gomma, facendola rimbalzare sul tavolino che separa i sedili. Lo osservo.
Poi il treno si ferma. E’ arrivata la mia fermata.
Scendo e quando sono sulla panchina poso i bagagli a terra e guardo il treno ripartire. All’interno ancora il bambino che continua a giocare con la sua pallina. Ma adesso il moto della pallina ha assunto un andamento diverso da quello che avevo osservato fino a pochi attimi prima sul treno; eppure il moto è lo stesso.
Immagine dell'autore / Tutti i diritti riservati
Il moto della pallina per come lo vedevo io dalla banchina
La causa di tutto ciò è il fatto che sia cambiato il mio punto di vista (per il bambino sul treno il moto della pallina non è variato tra prima e dopo).
Cambiando i punti di riferimento come cambia il moto?
Oggi nell’ANGOLO DELLA FISICA proverò a spiegarvi proprio il concetto di ”punto di vista” in Fisica.
MOTI RELATIVI
Il punto di vista di cui si parla poco sopra non è altro che il sistema di riferimento(1): si riesce a dimostrare sperimentalmente che le leggi della Fisica non dipendono dalla scelta del sistema di riferimento (SR). In altre parole: una volta che viene fissato un SR e stabilite le relative proprietà, queste restano vere anche se cambia l’origine e l’orientamento degli assi coordinati, cioè se il nostro studio avviene su un altro sistema ottenuto dal primo per mezzo di una traslazione (come è accaduto nel mio caso scendendo dal treno).
Se ne deduce che non esiste un punto o un orientamento privilegiato nello spazio:
lo spazio appare omogeneo ed isotropo.
La scena appare quindi diversa quando un fenomeno viene osservato da due SR in moto uno rispetto all’altro (come nel caso del treno). Più esattamente il moto di ogni corpo è di per sé unico, ma viene descritto con leggi diverse in due SR in moto relativo.
MOTI RELATIVI
Prendiamo in considerazione un punto P che si muove lungo una propria traiettoria generica. Il moto che ne deriva è poi osservato da una terna cartesiana [x,y,z] con centro in O (sistema di riferimento fisso) ed una terna cartesiana [x’,y’,z’] con centro in O’ (sistema di riferimento mobile). Il punto O’ ha velocità vo’ rispetto al sistema fisso; inoltre [x’,y’,z’] può ruotare con velocità angolare ω (si tratta di una velocità di rotazione [la velocità è la variazione di una grandezza nel tempo]: in questo caso è la velocità di variazione di un angolo nel tempo e si misura in radianti al secondo [rad/s]).
Cerchiamo quindi di capire che relazioni descrivano la posizione, la velocità e l’accelerazione del punto P rispetto ai due SR.
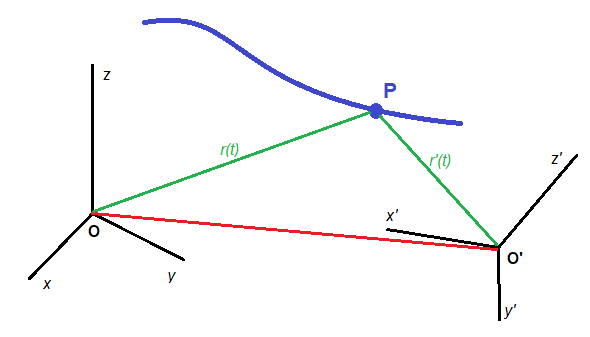
Immagine dell'autore / Tutti i diritti riservati
I due sistemi di riferimento con il puto P e la sua traiettoria
NOTA: tutte le grandezze inserite in grassetto sono da considerarsi vettori (sono quindi descritti da tre variabili, ognuna delle quali riferite ad una dimensione)
POSIZIONE DEL PUNTO
.gif)
Utilizziamo il vettore v (velocità assoluta) per descrivere la velocità di P rispetto al SR fisso e v’ (velocità relativa) per descrivere la velocità di P rispetto al SR mobile.
Si dimostra quindi il teorema delle velocità relative:
.gif)
La velocità propria del punto P è detta velocità di trascinamento e dipende essenzialmente dalla posizione di P rispetto al SR mobile (r’) ed i parametri del sistema mobile rispetto a quello fisso.
.gif)
- ω=0 Il sistema mobile non ruota rispetto a quello fisso; in questo caso si tratta di moto relativo traslatorio tra i due sistemi, cioè di moto di trascinamento traslatorio.
.gif)

- vo’=0 Il sistema fisso sta solo ruotando, ma non si sta muovendo: si tratta di un moto relativo rotatorio tra i due sistemi, cioè moto di trascinamento rotatorio.
.gif)

Il moto generale può essere quindi visto come l’unione (somma) del moto relativo rotatorio ed un moto relativo traslatorio tra i due sistemi.
Alla velocità (come abbiamo visto in un precedente post) è sempre collegata l’accelerazione. Vediamo quindi come si comporti il punto P rispetto ai due SR (chiameremo la seguente formula FORMULA α):
.gif)
a: accelerazione del punto P nel sistema di riferimento fisso (accelerazione assoluta)
a':accelerazione del punto P nel sistema di riferimento mobile (accelerazione relativa)
accelerazione di O' rispetto ad O
I due SR considerano il punto P soggetto ad accelerazioni diverse, ma sono correlate dalla formula α. Si introduce così il concetto di accelerazione di trascinamento, che dipende dal moto relativo dei due sistemi, e l’accelerazione complementare (detta anche di Coriolis), che dipende dal moto di P rispetto al sistema mobile (v’).

.gif)
.gif)
.gif)
.gif)
SISTEMI DI RIFERIMENTO INERZIALI e LA RELATIVITA’ GALILEIANA
Sistema di riferimento inerziale: è un sistema per cui risulta sempre vera la legge di inerzia, ovvero un punto non soggetto a forze se in quiete resta in quiete e se lanciato con velocità arbitraria in qualsiasi direzione si muove di moto rettilineo uniforme (riferimento ad un vecchio mio post).
E’ logico attendersi che la definizione appena descritta abbia significato solo se siamo in grado di verificare che il punto non sia soggetto a forze. Siamo sicuri di essere in questa situazione quando il punto è lontano da qualsiasi altro punto (così da non essere condizionato) ed anche quando le forze agenti sono tali da annullarsi a vicenda.
In un SRI la legge di Newton F=ma* mostra al primo membro le forze vere, cioè quelle derivanti dalle iterazioni fondamentali (forza gravitazionale ed elettromagnetica).
Consideriamo adesso i due casi possibili:
- Il SRI si muove di moto traslatorio uniforme rispetto ad un certo sistema inerziale. Si ha quindi:
.gif)
Dalla formula α ricaviamo che a=a’, cioè le accelerazioni del punto P calcolate nei due sistemi di riferimento sono le stesse. Se a=0 anche a’=0 e quindi anche il secondo sistema inerziale.
Definito un sistema di riferimento inerziale, tutti gli altri sistemi in moto rettilineo uniforme rispetto a questo sono anch’essi inerziali
Se ne deduce infine che la legge di Newton si scrive nei due sistemi con gli stessi valori di F e di a. Conseguenza importante di questo, essendo la dinamica la stessa, è che non è possibile stabilire a priori se uno di essi sia in moto oppure in quiete. Non possiamo quindi parlare di moto assoluto. Questa condizione fisica è anche detta *Relatività Galileiana (2). - Se invece il secondo sistema è soggetto ad un moto accelerato rispetto al sistema inerziale:
.gif)
.gif)
Si nota in questo secondo caso che la legge di Newton non è più valida: laforza vera che agisce sul punto studiato non è proporzionale all’accelerazione del punto stesso misurata nel sistema accelerato. La formula α ci spiega ciò: in questo caso a≠a’: moltiplichiamo per la massa le varie componenti della formula α

L’accelerazione del punto materiale per la massa (ma’) è uguale alla forza vera (F) agente sul punto più le forze apparenti; queste (proporzionali ognuna alla massa) sono dette forze di inerzia e sono agenti solo nel sistema inerziale.
Conclusione:
le forze apparenti non derivano dalle iterazioni fondamentali e non esistono in un sistema di riferimento inerziale
Bibliografia
1 Sistemi di riferimento
2 Relatività Galileiana
3 "Elementi di Fisica - Meccanica/Termodinamica" (Mazzoldi-Nigro-Voci)
 Imagine CC0 Creative Commons, thanks to @mrazura for the logo ITASTEM. CLICK HERE AND VOTE FOR DAVINCI.WITNESS
Imagine CC0 Creative Commons, thanks to @mrazura for the logo ITASTEM. CLICK HERE AND VOTE FOR DAVINCI.WITNESS