Arduino DIY | How to control a Arduino car by bluebooth | 如何用蓝牙控制Arduino小车
Before reading:
I write it on my PC typora ,but I find the passage with something wrong when I copy the passage to Utopian post editor.So I upload to the github.It is recommended to read on the below url.Thanks.
The more readable version
1.Have a look at my achievement first
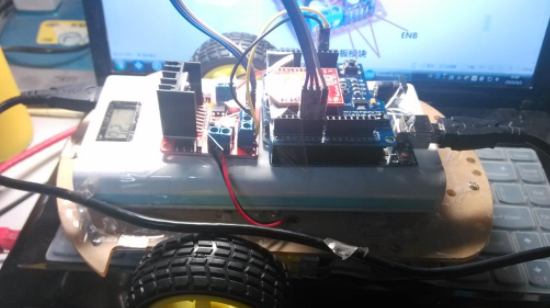

2.Module compoents
Arduino UNO minichip * 1

L298N Motor driven module * 1

Arduino Bluetooth Bee module * 1

Arduino Bluetooth expansion board * 1
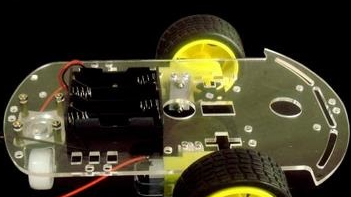
Car chassis * 1
Power supply (7~9V) * 1
Wires * several
INSTRUCTIONS:
- My car is two wheels driven so I choose the L298N motor driven module.I recommend it to you if you also want to make a two wheels driven car.
- The Bee bluetooth module I choose is really convient for me ,which can directly insert the Bluetooth into the expansion board,then connect the bluetooth expansion board with Arduino.
- The 7-9V power can drive two motors better.If you want more than two motors , you should use a more poweful battery.
3.How to connect modules with Arduino
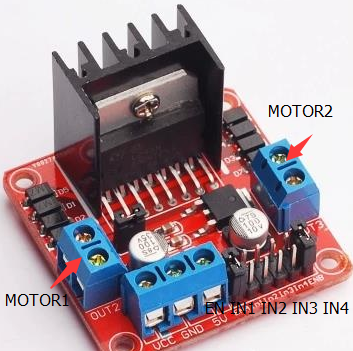
| L298N | Arduino OR Battery |
|---|---|
| GND | Arduino GND |
| VCC | Battery + |
| 5V | Arduino 5V |
| IN1 | Arduino D4 |
| IN2 | Arduino D5 |
| IN3 | Arduino D6 |
| IN4 | Arduino D7 |
| MOTOR1 OUTPUT | MOTOR1 |
| MOTOR2 OUTPUT | MOTOR2 |
| ENA | IN1 | IN2 | Status |
|---|---|---|---|
| 0 | X | X | STOP |
| 1 | 0 | 0 | BRAKE |
| 1 | 0 | 1 | FORWARD |
| 1 | 1 | 0 | BACKWARD |
| 1 | 1 | 1 | BRAKE |
IN1 and IN2 control motor 1. IN3 and IN4 control motor2
The form above is the same for the motor1 as well as the motor2
4.Run the motors
First I simply designed a program to implete running the left wheel forwardly for 2 seconds ,then stopping for 2seconds , and running backwardly for 2 seconds ,then stopping for 2 seconds.
#define IN1 4 #define IN2 5 void setup() { pinMode(IN1,OUTPUT); pinMode(IN2,OUTPUT); } void loop() { digitalWrite(IN1,HIGH); digitalWrite(IN2,LOW); //forward delay(2000); digitalWrite(IN1,LOW); digitalWrite(IN2,LOW); //stop delay(2000); digitalWrite(IN1,LOW); digitalWrite(IN2,HIGH); //backward delay(2000); digitalWrite(IN1,LOW); digitalWrite(IN2,LOW); //stop delay(2000); }Second I simply designed a program to implete running the right wheel forwardly for 2 seconds ,then stopping for 2seconds , and running backwardly for 2 seconds ,then stopping for 2 seconds.
#define IN3 6 #define IN4 7 void setup() { pinMode(IN3,OUTPUT); pinMode(IN4,OUTPUT); } void loop() { digitalWrite(IN3,HIGH); digitalWrite(IN4,LOW); //forward delay(2000); digitalWrite(IN3,LOW); digitalWrite(IN4,LOW); //stop delay(2000); digitalWrite(IN3,LOW); digitalWrite(IN4,HIGH); //backward delay(2000); digitalWrite(IN3,LOW); digitalWrite(IN4,LOW); //stop delay(2000); }
REMEMBER:
Before uploading the code ,you should disconnect Arduino with the bluetooth module.
5. Simple motion of the car
| WHEEL | FORWARD | BACKWARD | STOP |
|---|---|---|---|
| LEFT | FORWARD | BACKWARD | STOP |
| RIGHT | FORWARD | BACKWARD | STOP |
| WHEEL | TURN LEFT FORWARDLY | TURN LEFT BACKWARDLY | TURN LEFT ON THE SPOT |
|---|---|---|---|
| LEFT | STOP | STOP | BACKWARD |
| RIGHT | FORWARD | BACKWARD | FORWARD |
| WHEEL | TURN RIGHT FORWARDLY | TURN RIGHT BACKWARDLY | TURN RIGHT ON THE SPOT |
|---|---|---|---|
| LEFT | FORWARD | BACKWARD | FORWARD |
| RIGHT | STOP | STOP | BACKWARD |
According to the form above ,we can write the code easily
#define IN1 4
#define IN2 5
#define IN3 6
#define IN4 7
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop()
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW); //forward left wheel
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW); //forward right wheel
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //stop left wheel
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //stop right wheel
delay(1000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH); //backward left wheel
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH); //backward right wheel
delay(2000);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW); //stop left wheel
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW); //stop right wheel
delay(3000);
}
6. Function writing
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
7. Function using
Movement process:
forward for 2S ------> backward for 2S ------> forwardly left turn 2S ------> backwardly left turn for 2S ------> forwardly Turn right turn for 2S ------> backwardly turn right for 2S ------> turn left on the spot for 2S ------> turn right on the spot for 2S ------> stop 3S
#define IN1 4
#define IN2 5
#define IN3 6
#define IN4 7
void forward( );
void back( );
void turnLeft( );
void turnRight( );
void turnbackLeft( );
void turnbackRight( );
void turnLeftOrigin( );
void turnRightOrigin( );
void _stop();
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
}
void loop()
{
forward( );
delay(2000);
back( );
delay(2000);
turnLeft( );
delay(2000);
turnbackLeft( );
delay(2000);
turnRight( );
delay(2000);
turnbackRight( );
delay(2000);
turnLeftOrigin( );
delay(2000);
turnRightOrigin( );
delay(2000);
_stop();
delay(3000);
}
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
8. Using the bluetooth module
This step is the key of our DIY project.
There are several points about that:
- We can use 'Serial.read()' to read the Bluetooth order .
- All the order will be conversed to ASCII code
- When we receive the order ,we can use ASCII code or single quotation mark to judge what the order is.For example If the mobile terminal sends a "1", then we receive ASCII code of '1' on the side, so when we want to judge which number we receive we need to use case '1' or case49 to decide .(Note: ASCII code of 1 is 49).
Test the bluetooth demo
whenever receiving the number '1', LED on Arduino D13 will power on.
void setup() { pinMode(13,OUTPUT); Serial.begin(9600); } int i; void loop() { if(Serial.available()>0) { i=Serial.read(); switch(i) { case'1': {digitalWrite(13,HIGH);break;} case'2': {digitalWrite(13,LOW);break;} } } }
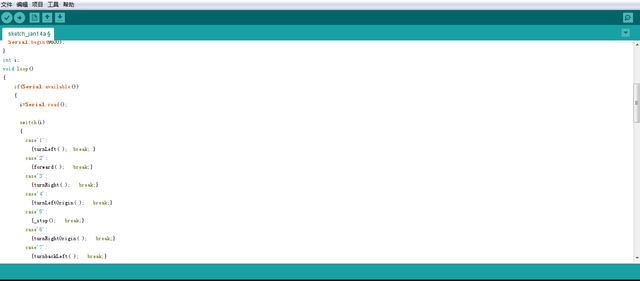
Use the number one to nine to control the car movement.
ORDER MOVEMENT 1 turnLeft 2 forward 3 turnRight 4 turnLeftOrigin 5 NONE 6 turnLeftOrigin 7 turnbackLeft 8 back 9 turnbackRight
#define IN1 4
#define IN2 5
#define IN3 6
#define IN4 7
void forward( );
void back( );
void turnLeft( );
void turnRight( );
void turnbackLeft( );
void turnbackRight( );
void turnLeftOrigin( );
void turnRightOrigin( );
void _stop();
void setup()
{
pinMode(IN1,OUTPUT);
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
Serial.begin(9600);
}
int i;
void loop()
{
if(Serial.available())
{
i=Serial.read();
switch(i)
{
case'1':
{turnLeft( ); break; }
case'2':
{forward( ); break;}
case'3':
{turnRight( ); break;}
case'4':
{turnLeftOrigin( ); break;}
case'5':
{_stop(); break;}
case'6':
{turnRightOrigin( ); break;}
case'7':
{turnbackLeft( ); break;}
case'8':
{back( ); break;}
case'9':
{turnbackRight( ); break;}
}
}
}
void forward( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void back( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnbackLeft( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void turnRight( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnbackRight( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void turnLeftOrigin( )
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
void turnRightOrigin( )
{
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void _stop()
{
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
That is all .Thanks for visiting and reading patiently.
Posted on Utopian.io - Rewarding Open Source Contributors
Hey @cha0s0000 I am @utopian-io. I have just upvoted you!
Achievements
Suggestions
Get Noticed!
Community-Driven Witness!
I am the first and only Steem Community-Driven Witness. Participate on Discord. Lets GROW TOGETHER!
Up-vote this comment to grow my power and help Open Source contributions like this one. Want to chat? Join me on Discord https://discord.gg/Pc8HG9x
I have been in steemit for such a short time and of couse I have not realized all the function of steemit and the Utopian.Thanks for your suggestions and notices as well as your big upvoting.I am glad to add more contributions on Utopian.
Thank you for the contribution. It has been approved.
You can contact us on Discord.
[utopian-moderator]
Thanks a lot
Congratulations @cha0s0000, this post is the fifth most rewarded post (based on pending payouts) in the last 12 hours written by a Dust account holder (accounts that hold between 0 and 0.01 Mega Vests). The total number of posts by Dust account holders during this period was 12013 and the total pending payments to posts in this category was $4073.46. To see the full list of highest paid posts across all accounts categories, click here.
If you do not wish to receive these messages in future, please reply stop to this comment.
I am glad to receive it .Thanks a lot
Nice work and easy to follow. I like how you laid things out in steps, testing one thing at a time.
I am glad you like it