Let's discuss what it take to fly a quadcopter drone [part 1]
"what would you like to become in the nearest future?" Believe me you, there is always an answer to this question ranging from being a doctor, lawyer, engineer and many more but this answers varies as one grows older. I have always wanted to be a pilot for a very long time but as I come of age, things aren't going exactly as planned and now I am very very distant from my beautiful dream so to say.

Well, I'll say that of recent, i actually got a little taste of what it would have been like if I were to be a pilot and I must be sincere with you, I felt "wowed". Yea, I learnt how to fly a quadcopter drone though it wasn't as exact as initially planned by my younger self.
I didn't only learn how to fly it but flew one myself and on this post, I'll like share with you what you need to know in order to fly this UAV (Unmanned aerial vehicle) should in case you come across one. I already made an introductory post on quadcopter in the past here. There, I talked about the fundamental components, benefits, applications and limitations of this UAV. I also discuss about its flight dynamics a little, to give an insight into how its hover and thrust itself into and within the air.

To begin with, during the course of flying a drone, I must tell you, it is essential you understand the vehicle itself in order to have a valid idea on how to diagnose and fix any problems encountered during operation. Having understood your UAV will give you extra confidence while flying and also what component needs to be inspected before any flight or are available for an upgrade should in case one is needed or desired. Now, understanding the vehicle entails the following:
- Learning about the basic components (parts) and their effect on the flight dynamic
- Learning about the four major control of the vehicle and how it affect the movement in air.
- Understanding its safety precautions.
- Major steps carried out before fly the drone.
- How to fly it.

Before venturing into what it take to pilot a quadcopter drone, I will like to give a brief introduction to what a drone is all about. The term "drone" as widely known by the general masses, is nothing but an unmanned aerial vehicle (no pilot aboard) equipped with the vital features needed to make life easy, as it has found its usefulness in many applications. Its miniaturized size, without a doubt, has always been one of its biggest advantages in many application for which they can be used because they are easy to control and navigate.
In the military, situations or missions considered too risky or difficult to accomplished, UAV is always the right choice as they help reduces casualties with a lot of other benefits like surveillance and reconnaissance, combat and many more. Other field such as delivery system, inspection, photography, scientific research, film making and many more, has also benefit greatly from the use of drones.

A quadcopter is a four rotor propelled aerial vehicle, belongs to the class of multi-rotors drones (others includes helicopter, tricopter, hexacopter and so on) based on their numbers of rotors, however they are not the only types of drone available as there are others as well namely; fixed wing, single rotor and fixed wing hybrid. In here, you will find the summary of all types of drones including their pros and cons.
What makes a quadcopter?
When you see an advert of a quadcopter online or let say you are seeing the real vehicle for the very first time, it does kinda looks a bit complex, am i right? Yea, it does but I must tell you, its not that complex because you can actually design one yourself, all you need to understand is its basic mode of operation, its different parts/components and I think if the resources are available at your disposal, you are good to go. Having a knowledge about the basic parts of the quadcopter is essential when troubleshooting repairs or should in case one desires an upgrade. Am sure you will agree with me on this. These parts includes the chassis, electric motors, propellers, ESCs (Electronic Speed Controller), flight controller, radio transmitter and battery/battery charger.
The chassis also known as fuselage, is the body or should i say the base frame of every vehicle within which all other components and parts of the vehicle are attached to or mounted on as this part serves as the skeleton for the entire system. Made up of lightweight materials such as carbon fibre, aluminium, glass fibre, plastics and so many more. Now, an important factor needed to be noted is the weight of the chassis as this tends to affect properties of other components such as the propeller and the electric motor. Increase in the weight require a longer propeller, likewise a powerful motor to facilitate the lift required to overcome the weight.
Roughly, all modern days drone designs makes use of a brushless electric motor which are more efficient and quieter compared to conventional motor. The speed which amount to the number revolution completed in one minute is a property that must not be overlooked. The more the speed (RPM), the more the power consumed and this in turn reduces the flight time of the aircraft as the battery is drained faster. So to maintain better efficiency, RPM must be as low as possible.

The speed at which the aircraft fly and maneuever itself within the air is strongly affected by the propeller's speed. The propellers in collaboration with the motors, are solely responsible for generating the lift necessary for overcome the weight and to ensure proper maneuevering capability of the aerial vehicle. Changing the length and the pitch (the shape and slant) of the propeller affects the aircraft's flight pattern. A proper sized quadcopter with long propellers plus a perfect pitch, attached to low RPM motor will aid a smoother long flying experience and of course a longer flight time.
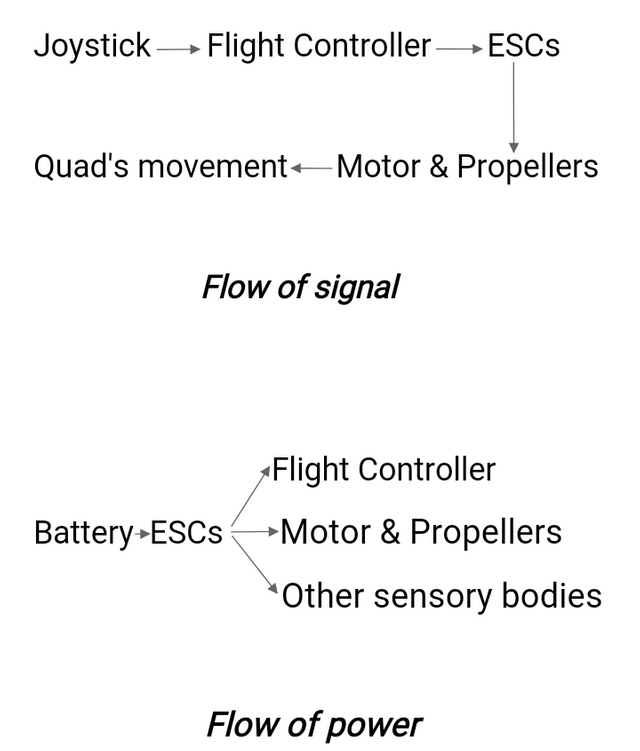
As its name implies, what ESC does is to control the speed at which each of the four motors attached to the vehicle rotates. It is an electronic circuit design for the purpose of altering the speed of the electric motor by supplying the necessary modulated current needed to generate the rotational speed for the lift. Each motor comes with its own ESC with each serving as a linking between the battery and motor. Within its circuit, is an additional circuitry known as the battery eliminator. This circuit act as a voltage regulator by indirectly connecting the battery with the other sensitive components such as the flight controller and other sensory components mounted on it.
Here comes that little computer, the brain behind the quadcopter, flight controller! What it typically does is to control and guide the aerial vehicle by interpreting the signal sent to the aircraft by the remote controller. It regulate the motor speeds through the ESC ensuring a precise and accurate flight pattern as desired. Input from the onboard sensor like the GPS module, accelerometer, avoidance sensors and many more, mount on the flight controller board, are likewise interpreted as well.
If asked, how does the signal reaches the flight controller from the remote control? This task is carried out by the radio reciever installed within the system. It comprises of components linked to the flight controller, to receives signals, likewise to send this signals to the flight controller for processing. An average radio reciever should support at least four channels (the control input from the remote controller) for the vehicle's movement.

Image source: Me
Every aerial vehicle requires a power source, be it power engine driven or battery powered. A quadcopter is powered using a battery since we can't actually plug our aircraft to the mains while flying it at the same time. It employs the use of lithium polymer (LiPo) battery due to its numerous benefits such as increased in capacity with light weight, a prolonged life and many more. Along with every quad comes a battery charger designed specially to provide sufficient current needed to safely charge the battery.
Understanding the basis of its flight dynamics all begins with four major forces acting on the UAV, namely; weight (force of gravity), lift, drag and thrust. The force 'lift' is generated by the quad's propellers and motors in order to overcome its weight (that force that pull every object back to earth). So in short, the lift force generated must be greater than the weight of the quad in order for the vehicle to ascend and hover in the air. While the force 'drag' (the resistance encountered by object moving through the air or fluid) must as well be overcomed with 'thrust', another force also generated by the vehicle's motors and propellers.

Image source: Me
So in general, the flight pattern of the vehicle depends on the brushless electric motors and the propellers mounted on them and should in case any of this part is faulty, NO FLYING! A standard quad remote controller must be designed with at least four channels to provide the lift and the thrust and this channels (throttle, roll, yaw and pitch) I have mentioned and explained in detail on how each is achieved here but for better understanding, I'll be using the GIF image and table below to explain for easy comprehension.
{kind=link}
| Control | Direction | Propeller's speed | |
|---|---|---|---|
| Throttle | Ascending | All propellers' speed increased to produce a force greater than the weight of the vehicle | |
| - | Hover still | The net speed of all propellers must generate a force equals to the gravitational force pulling the vehicle down | |
| - | Descending | All propellers' speed must decrease with respect to the force of gravity | Right stick is pulled downward |
| Yaw | To rotate to the right | Propeller A and C rotate faster compared to manner props B and D rotate | |
| - | To rotate to the left | Propeller B and D rotates faster with respect to the speed B and D | |
| Pitch | To move forward | The speed of the back props D and C increases with respect to the front props' (A and B) speed | |
| - | To move backward | The speed of the front props (A and B) increases with respect to the back props C and D | |
| Roll | To move to the left | The speed of props A and D decrease while that of B and C increases | |
| - | To move to the right | Props (B and C) speed decreases while that of A and D increases |
Thank you for your time
References
Not all modern quadcopter uses the brushless motor; in fact, the reverse is the case as most low budget quadcopters are equipped with brushed motors which are less expensive. I am particularly fascinated by the massive array of solar panels. Your quadcopter looks like a DJI, pretty.
I agree with you on this
But this low budget quad dont have enough flight time sometimes due to the type of motor used and their size. Even when they makes use of brushless motor, their flight time tends to increase compared to the brush type, this i confirmed reseaching on the difference between the two motors. So when quality, improved technology and more flight time is required, brushless type are the best.
Its a DJI phantom 4 type
Thanks for dropping by
Brushed motors are more efficient, left for every quadcopter manufacturer they'd use it. The only problem is the cost, most cheap quadcopter makers are doomed to use the brushed version. Similarly, lithium batteries are better batteries, lightweight, higher energy density compared to the conventional lead-acid batteries, but in most application, people opt for the cheaper version-lead acid batteries. What drives this decision? Cost. Yeah, no one wants to break his bank in setting up a renewable system when there are cheaper, albeit less efficient system in the market :)
DJI are premium quadcopter make, no surprises that their motors are brushless. Like my grandma used to say, "You get what you pay for." :D
This post has been voted on by the steemstem curation team and voting trail.
There is more to SteemSTEM than just writing posts, check here for some more tips on being a community member. You can also join our discord here to get to know the rest of the community!
Hi @sunkanmi02!
Your post was upvoted by utopian.io in cooperation with steemstem - supporting knowledge, innovation and technological advancement on the Steem Blockchain.
Contribute to Open Source with utopian.io
Learn how to contribute on our website and join the new open source economy.
Want to chat? Join the Utopian Community on Discord https://discord.gg/h52nFrV