APLICACIÓN EN ANDROID PARA MANIOBRAR UNA SILLA DE RUEDAS ELÉCTRICA ANDROID APP TO COMMAND AN ELECTRIC WHEELCHAIR
Hola a todos en la comunidad, un cordial saludo a todos los del grupo #stem-espanol, me gusto mucho la idea que tienen y me gustaría hacer mi propia participación , compartiendo el articulo del proyecto por el que opte al grado de ingeniería de sistemas en la Universidad Cooperativa de Colombia sede Santa marta, en Santa Marta Colombia.
APLICACIÓN EN ANDROID PARA MANIOBRAR UNA SILLA DE RUEDAS ELÉCTRICA 1
1 : Título proyecto de investigación: Sistema de Control con Redes Neuronales
para Silla de Ruedas Asistida por Comandos de Voz, Programación de Ruta,
manejada por Aplicación Celular y con un Sistema de Carga mediante Celdas
Solares. (Financiado por el Comité Nacional para el Desarrollo de la
Investigación, CONADI, Universidad Cooperativa de Colombia)
Grupo de Investigación: Ingeniería Sostenible e Inteligente, ISI. Facultad
de Ingeniería, Universidad Cooperativa de Colombia, Sede Santa Marta.
Línea de Investigación: Automatización Industrial.
Nombre Investigador principal: Jose F. Noguera Polania
ANDROID APP TO COMMAND AN ELECTRIC WHEELCHAIR
José Noguera 2
2: Ingeniero Electrónico Universidad Cooperativa de Colombia, Santa Marta.
Magíster en Ingeniería. Universidad de los Andes, Bogotá D. C. Profesor
Investigador Universidad Cooperativa de Colombia, Santa Marta. Dirección de
correspondencia: Universidad Cooperativa de Colombia, Sede Santa Marta, Troncal
del caribe sector mamatoco, e-mail:[email protected]. Grupo de
Investigación: Ingeniería Sostenible e Inteligente, ISI. Facultad de Ingeniería,
Universidad Cooperativa de Colombia, Sede Santa Marta. Línea de Investigación:
Automatización Industrial.
Sergio Guerrero 3
3 : Estudiante Ingeniería de Sistemas Universidad Cooperativa de Colombia,
Santa Marta. Dirección de correspondencia: Universidad Cooperativa de Colombia,
Sede Santa Marta, Troncal del caribe sector mamatoco, e-mail:
[email protected]. Grupo de Investigación: Ingeniería
Sostenible e Inteligente, ISI. Facultad de Ingeniería, Universidad Cooperativa
de Colombia, Sede Santa Marta. Línea de Investigación: Automatización
Industrial.
Omar Carreño 4
4: Estudiante Ingeniería de Sistemas Universidad Cooperativa de Colombia,
Santa Marta. Dirección de correspondencia: Universidad Cooperativa de Colombia,
Sede Santa Marta, Troncal del caribe sector mamatoco, e-mail:
[email protected]. Grupo de Investigación: Ingeniería Sostenible
e Inteligente, ISI. Facultad de Ingeniería, Universidad Cooperativa de Colombia,
Sede Santa Marta. Línea de Investigación: Automatización Industrial.
Luis Arias 5
5 Estudiante Ingeniería de Sistemas Universidad Cooperativa de Colombia,
Santa Marta. Dirección de correspondencia: Universidad Cooperativa de
Colombia, Sede Santa Marta, Troncal del caribe sector mamatoco, e-mail:
[email protected]. Grupo de Investigación: Ingeniería
Sostenible e Inteligente, ISI. Facultad de Ingeniería, Universidad
Cooperativa de Colombia, Sede Santa Marta. Línea de Investigación:
Automatización Industrial.
RESUMEN
En el presente documento se muestran los resultados del proyecto “Aplicación
Android para silla de ruedas, que permita controlarla por comandos de voz,
pantalla táctil y programación de ruta”, financiado por la Universidad
Cooperativa de Colombia. Se presenta una aplicación en sistema operativo Android
que controla una silla de ruedas eléctrica para uso de personas que presenten
movilidad reducida con el fin de mejorar su calidad de vida y desarrollo en la
sociedad. Este aplicativo se desarrolló por medio de la interfaz de Android
Studio con el fin de reducir los costos de implementación gracias a su
estrategia de Open Source (Codigo Libre). En este prototipo de silla de ruedas
se presenta 4 sensores ultrasónicos para detectar la proximidad de objetos,
tacos de protección, un sistema de carga de baterías con un panel solar, un
joystick para manipular la silla, una tarjeta de distribución de señales de
entrada y salida del prototipo y un dispositivo Arduino, que se encarga de
procesar e interpretar los datos provenientes de la aplicación, sean éstos de
voz, panel táctil o programación de ruta, a través de un módulo wifi CC3000 de
arduino que gestiona el envío de señales a la etapa de potencia. La etapa de
potencia emplea un circuito Puente H para el cambio de dirección en los motores.
Palabras Clave: Aplicación Android; Silla de ruedas eléctrica; Control por
voz; Motores DC; Programación de Ruta; Arduino.
ABSTRACT
The document presents the results of "Android Application wheelchair, which
allows control by voice commands, touch screen and path programming" project,
financed by the Universidad Cooperativa de Colombia. A mobile app is developed
on Android operating system to control an electric wheelchair. The app can be
used by disabled persons in order to improve their quality of life and
development in society. This application was developed by Studio Android
interface in order to reduce implementation costs thanks to its strategy of Open
Source (open source). In this prototype wheelchair four ultrasonic sensors is
presented to detect the proximity of objects, tacos protection, a system of
charging batteries with a solar panel, a joystick to manipulate the chair,
distribution board input and output of the prototype and a Arduino device, which
is responsible for processing and interpreting the data from the application,
whether voice, touch panel or programming route through a wifi CC3000 module
Arduino managed by sending signals to the power stage. The power stage uses an H
bridge circuit for changing direction in the engines.
Keywords: Android App; Electric wheelchair; Voice control; DC motors; path
programming; Arduino.
INTRODUCCIÓN
Desde el año 1869, la silla de rueda ha sido una importante herramienta para
todas aquellas personas que sufren de algún problema de locomoción o movilidad
reducida, esta pieza ha sido ampliamente estudiada y rediseñada para adaptarse a
las necesidades de las personas, la silla de ruedas eléctrica nos provee de un
uso tecnológico avanzado con muchos componentes que facilitan la vida diaria.
Los investigadores en se diseñó un sistema que incluye diversos campos de la
electrónica como lo son: el tratamiento de señales, la electrónica de potencia,
la inteligencia artificial y el campo de control y la automatización. Todo esto
concentrado en una silla de ruedas automatizada la cual posee un sistema
automático de movimiento y un módulo reconocimiento de voz, donde su control se
realiza a través de sencillos comandos como: Adelante, atrás, derecha, izquierda
y pare. El modulo que realiza el procesamiento de la voz en el sistema, es el
sistema de desarrollo “Voice Direct 364”, el cual en un circuito integrado
incluye un DSP (Dispositivo de Protección contra Sobretensiones) y una red
neuronal, el DSP realiza el procesamiento de la señal y la red neuronal realiza
la identificación de la palabra.
“Los usuarios con deficiencia motora severa pueden tener dificultades para
operar una silla de ruedas cuando están en espacio reducido (por ejemplo, puerta
de entrada que pasa) o al evitar obstáculos ya que no pueden ordenar a la silla
de ruedas por medio de una palanca de mando convencional.” . Estos autores
proponen un marco teórico que puede ser útil a los usuarios a superar las
circunstancias adversas utilizando una estrategia de control semiautónomo
jerárquica. Inicialmente, las entradas de usuario multimodal basado en el ángulo
de guiñada y la cabeza del interruptor momentáneo se analizan para decidir un
modo de maniobra y asignar la dirección de la marcha. A continuación, la
información ambiental se percibe mediante la combinación de un telémetro láser y
el sensor Kinect para determinar el mapa de seguridad alrededor de la vecindad
de la silla de ruedas.
Como afirman los autores en y las referencias contenidas en su artículo, la
silla de ruedas refleja un importante aspecto de independencia y calidad de vida
en personas con discapacidad en sus extremidades, por lo tanto, la realización
de mejoras a ésta, será consecuentemente una mejora positiva a los dos
indicadores anteriores .
De acuerdo con se presentó una propuesta de un prototipo de una silla de ruedas
para motorizarla y controlarla por medio de un dispositivo móvil con Sistema
Operativo Android, que surgió como respuesta a la necesidad de desplazamiento
que enfrentan niños y niñas con discapacidad motriz. La utilización de una silla
de ruedas motorizada de bajo costo y manipulada por el propio usuario a través
de un sistema móvil resulta una valiosa alternativa. El prototipo obtenido se
diseñó de acuerdo a las especificaciones de los terapeutas y asesores de la UOP
(Unidad de Orientación al Público, en Tuxtla) y fue evaluado satisfactoriamente
con niños y niñas de esta institución.
De esta forma, la presente investigación tiene como objetivo principal el
desarrollo de una silla de ruedas a la cual se le adapta un sistema
electro-mecánico y circuito de acondicionamiento de señales para que una persona
con paraplejia la pueda operar a partir de diversos medios como voz, panel
táctil celular o programación de ruta. A través de los años el desarrollo de la
silla de ruedas ha venido evolucionando, buscando nuevas mejoras que les
faciliten la movilidad a las personas que sufren de paraplejia o discapacidad en
las extremidades inferiores. Por tal motivo, son diferentes los esfuerzos que se
han realizado a nivel mundial por diferentes organizaciones en aras de mejorar
la calidad de vida de esta población discapacitada.
MARCO REFERENCIAL Y TEÓRICO
Odometría
Según Odometría es el método más utilizado para determinar la posición
momentánea de un robot. En las aplicaciones más prácticas de odometría, ofrece
fácil acceso al posicionamiento en tiempo real, la frecuencia a la que las
medidas absolutas se deben llevar a cabo depende en gran medida de la precisión
del sistema de odometría.
Android
Android es un sistema operativo multi-dispositivo, inicialmente diseñado para
teléfonos móviles. En la actualidad se puede encontrar también en múltiples
dispositivos, como ordenadores, tabletas, GPS, televisores, discos duros
multimedia, mini ordenadores, cámaras de fotos, etcétera. Incluso se ha
instalado en microondas y lavadoras.
Android Studio
La interface se desarrolló en Android, por ser una plataforma de desarrollo
libre para aplicaciones con gran riqueza e innovaciones (sensores, localización,
servicios, etc.). “Una de las mayores fortalezas del entorno de aplicación de
Android es que se aprovecha del lenguaje de programación Java. El SDK de Android
no acaba de ofrecer todo lo disponible para su estándar del entorno de ejecución
Java (JRE), pero es compatible con una fracción muy significativa de la misma”.
Su sencillez, junto a la existencia de herramientas de programación gratuitas,
es principalmente la causa de que existan cientos de miles de aplicaciones
disponibles, que amplían la funcionalidad de los dispositivos y mejoran la
experiencia del usuario. . La mesa de trabajo de Android Studio se puede ver en
la figura 1.

Figura 1: Mesa de trabajo Android Studio. Fuente:(Elaboración Propia).
Actividades (Activities)
Una pantalla única con una interfaz de usuario se denomina actividad, por
ejemplo, una aplicación de correo electrónico puede tener una actividad que
muestra una lista de correo electrónico nuevo, otra actividad que compone un
correo y otra actividad que lee los mensajes. Aunque las actividades trabajan
conjuntamente para dar la sensación de una única aplicación, cada una de es
autónoma de las otras. Por lo tanto, otra aplicación externa diferente podría
arrancar cualquiera de estas actividades (si la aplicación de correo electrónico
lo permite). Por ejemplo, una aplicación que gestiona los contactos podría
iniciar la actividad que compone nuevos mensajes de correo indicando como
destinatario del mensaje al contacto elegido en la primera aplicación. Tal como
se muestra en la Figura 2 podemos ver dos actividades interactuando entre sí,
una actividad invoca a la otra, para el usuario esto sería como pasar página en
un libro.

Figura 2: ejemplo de una activity. Fuente:(
http://www.itcsolutions.eu/2011/08/31/android-tutorial
how-to-create-and-display-a-new-form-window-or-activity/).
Servicios (Services)
Un servicio es aquel componente que se ejecuta en segundo plano y no está en
constante uso, es decir, realiza operaciones cada cierto tiempo. Un servicio no
brinda una interfaz gráfica al usuario, por ejemplo, un servicio puede
reproducir música en segundo plano mientras el usuario está en otra aplicación,
o puede obtener información de Internet sin la interacción del usuario. Un
servicio es implementado a partir de la clase Java Service. En la Figura 3
podemos ver una clase de java que representa un servicio, esta clase de ejemplo
al ser llamada por una actividad esperará 5 segundos en segundo plano y luego se
detendrá.
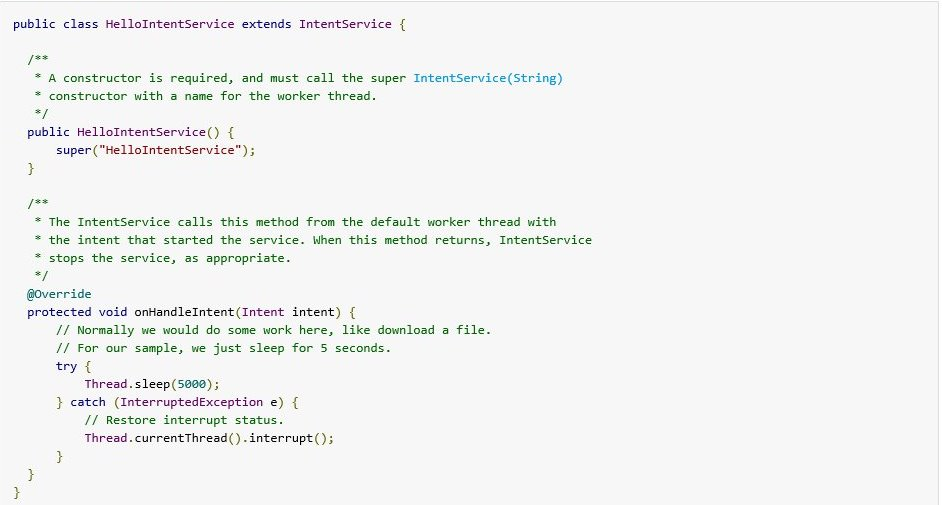
Figura 3: ejemplo de una activity. Fuente:(
https://developer.android.com/guide/components/services.html).
- METODOLOGÍA
Las investigaciones pueden ser de diferentes tipos, bien sea de campo, de
proyectos especiales, factibles o de tipo documental, todo esto según . La
presente investigación es del tipo factible puesto que está en concordancia con
los objetivos planteados y la finalidad con la que se desarrolló el proyecto, es
decir, se desarrolla un prototipo orientado a proporcionar una solución a un
problema planteado en un ambiente real. Este proyecto se apoyó en un diseño de
campo, puesto que los datos requeridos para la investigación fueron obtenidos
directamente de una silla de ruedas en funcionamiento.
Para alcanzar el éxito de los objetivos planteados, el desarrollo del proyecto
se ha separado en fases según la metodología de descomposición de trabajo WBS
(Work Breakdown Structure) y basando la constitución y desarrollo de las
actividades en la gestión de proyectos, que es la disciplina que permite
gestionar de manera organizada y administrar recursos de manera tal que se pueda
alcanzar con éxito los objetivos dentro del alcance, el tiempo y los costos
definidos. En este orden de ideas y teniendo en cuenta lo expuesto por el tipo
de investigación es mixta porque recolecta, analiza y vincula datos cualitativos
y cuantitativos en un solo proyecto de investigación.
.
- RESULTADOS
El prototipo de silla de ruedas
La silla de ruedas se compone de un banco de baterías panel solar de 80W y un
controlador de carga solar que indica el nivel de carga de la batería, este a su
vez sirve para mantener con energía el controlador Arduino a través del puerto
USB que posee. El prototipo tiene un sistema de protección con breakers para
evitar el daño de los circuitos por sobre carga de energía. El módulo de
potencia conformado por el puente H, la tarjeta de distribución y el
procesamiento de datos por el Arduino se explican más adelante, estos
componentes pueden verse evidenciados en la figura 4, anexo a esto el sistema
cuenta con sensores de movimiento y un joystick, estos componentes se están
trabajando en el macro proyecto denominado “Aplicación Android para silla de
ruedas, que permita controlarla por comandos de voz, pantalla táctil y
programación de ruta”


Figura 4: Componentes del prototipo silla de ruedas. Fuente:( Elaboración
propia).
Pruebas aplicación Android

Figura 5: Mapa de pruebas. Fuente:( Elaboración propia).
En la Figura 5 se representa el mapa de las pruebas realizadas en un ambiente
controlado cual está representado de color verde en todas las etapas, el color
azul representa el movimiento esperado, y el color rojo el movimiento realizado
por la silla. En las tablas 1, 2, 3 se pueden observar los valores obtenidos en
las pruebas.
Los datos de las pruebas realizadas en el método de control de ruta pueden verse
reflejadas en la tabla 1 las cuales fueron realizadas en un espacio abierto
delimitado es de 18 x 22,8 metros. Los datos de las pruebas realizadas en el
método de control por comando de voz pueden verse reflejadas en la tabla 2 las
cuales fueron realizadas en un espacio abierto delimitado es de 18 x 22,2
metros. Los datos de las pruebas realizadas en el método de control por pantalla
táctil pueden verse reflejadas en la tabla 3 las cuales fueron realizadas en un
espacio abierto delimitado es de 18 x 22,8 metros.
En el mapa número 1 de la figura 5 se describe el movimiento realizado por la
silla de ruedas utilizando el método de control ruta definida en este se trazó
una ruta en el aplicativo representada en la figura 6 como se puede observar en
la figura 5 mapa 1 los tramos v hasta w se presentó un desvió aproximado de 5°,
w hasta x se presentó un desvío aproximado de 4,5° , de x hasta y se presentó un
desvió aproximado de 10° , de y hasta z presento un desvío de 15°, estos desvíos
se deben a que el sistema de la silla de ruedas cuenta con dos motores los
cuales van a velocidades distintas, también varía por la carga sé que tenga en
la batería al momento de arrancar, también es debido a que en este proyecto no
se implementó un sistema de odometría, por lo cual el sistema no sabe realmente
como se debe ubicar en el espacio. En el aplicativo el diseño de ruta ya viene
previamente diseñado para esperar cierto tiempo entre los comandos. En los
cuales 3 segundos representan 3 metros, los trazos realizados en la pantalla son
independientes de su distancia, esto quiere decir que no importa el tamaño del
trazo realizado siempre va representar el mismo tiempo de envío.
| Tramo | Distancia | Esperado | Realizado |
|---|---|---|---|
| De a hasta b | 3 metros | x | |
| De b hasta c | 4,2 metros | x | |
| De c hasta d | 3,6 metros | x | |
| De d hasta e | 4,2 metros | x | |
| De v hasta w | 4,8 metros | x | |
| De w hasta x | 5,4 metros | x | |
| De x hasta y | 3,6 metros | x | |
| De y hasta z | 5,4 metros | x |
Tabla 1: Detalles del mapa N1, pantalla ruta. Fuente:( Elaboración propia).

Figura 6: Ruta definida en el aplicativo desde el dispositivo móvil. Fuente:(
Elaboración propia).
En el mapa número 2 de la figura 5 se describe el movimiento realizado por la
silla de ruedas utilizando el método de control por voz en este se trazó una
ruta en el aplicativo representada en la figura 7, como se puede observar en la
figura 5 mapa 2 los tramos v hasta w se presentó un desvió aproximado de 4°, w
hasta x se presentó un desvío aproximado de 8°, de x hasta y se presentó un
desvió aproximado de 5°, de y hasta z presento un desvío de 7°, estos desvíos se
deben a que el sistema de la silla de ruedas cuenta con dos motores los cuales
van a velocidades distintas, también varía por la carga sé que tenga en la
batería al momento de arrancar, también es debido a que en este proyecto no se
implementó un sistema de odometría, por lo cual el sistema no sabe realmente
como se debe ubicar en el espacio. Se enviaron datos desde el aplicativo con
tiempo intermedio de 3 segundos. Los cuales representaron aproximadamente 6
metros.
| Tramo | Distancia | Esperado | Realizado |
|---|---|---|---|
| De a hasta b | 6,6 metros | X | |
| De b hasta c | 6,6 metros | X | |
| De c hasta d | 6,6 metros | X | |
| De d hasta e | 6 metros | X | |
| De v hasta w | 8,4 metros | x | |
| De w hasta x | 8,4 metros | x | |
| De x hasta y | 9 metros | x | |
| De y hasta z | 10,5 metros | x |
Tabla 2: Detalles del mapa N2, por comando de voz. Fuente:( Elaboración propia).

Figura 7: Ruta definida por comando voz en el aplicativo. Fuente:( Elaboración
propia).
En el mapa número 3 de la figura 5 se describe el movimiento realizado por la
silla de ruedas utilizando el método de control por pantalla táctil en este se
trazó una ruta en el aplicativo representada en la figura 8, como se puede
observar en la figura 5 mapa 1 los tramos de v hasta w se presentó un desvió
aproximado de 10°, w hasta x se presentó un desvío aproximado de 10° , de x
hasta y se presentó un desvió aproximado de 5° , de y hasta z presento un desvío
de 5°,como logra apreciar los grados desvíos en los dos primeros tramos se deben
a que van en la misma dirección y sentido, lo mismo pasa en los siguientes dos
tramos, dichos desvíos se deben a que el sistema de la silla de ruedas cuenta
con dos motores, los cuales van a velocidades distintas, también varía por la
carga sé que tenga en la batería al momento de arranca. En el aplicativo,
mantener presionada la pantalla 3 segundos representa aproximadamente 3 metros.
| Tramo | Distancia | Esperado | Realizado |
|---|---|---|---|
| De a hasta b | 4,2 metros | x | |
| De b hasta c | 5,4 metros | x | |
| De c hasta d | 5,4 metros | x | |
| De d hasta e | 5,4 metros | x | |
| De v hasta w | 7,2 metros | x | |
| De w hasta x | 6,2 metros | x | |
| De x hasta y | 6 metros | x | |
| De y hasta z | 6,6 metros | x |
Tabla 3: Detalles del mapa N3, panel táctil. Fuente:( Elaboración propia).

Figura 8: Ruda definida por pantalla táctil en el aplicativo :( Elaboración
propia).
La ruta esperada se marcó en el suelo del espacio donde se realizaron las
pruebas lo que hace más precisa la obtención de los datos de desvío. Es de
resaltar que en todas las pruebas realizadas el recorrido de la silla se
desplazó más de lo indicado en todos los tramos, esto es debido al tiempo que
hay entre los envíos y la recepción de datos, hacen parte también en este margen
de desvíos de la silla de ruedas otros factores ajenos al aplicativo y a la
odometria, como por ejemplo:
La cantidad de presión de aire que posee cada llanta.
La alineación de las llantas y lubricación de las mismas.
Desarrollo Mecánico
Como se observa en la Figura 9, sección izquierda, en las partes seleccionadas,
se soldaron barras metálicas para obtener mayor soporte, puesto que se va a
someter a un peso que varía dependiendo la contextura del usuario y también
sirve para alojar la batería que energiza el sistema. También se adecuaron
llantas de menor radio, que permiten el ajuste de la relación de piñonería y
cadena para darle más fuerza al movimiento de las ruedas. También fue necesario
el uso de un torno industrial para alinear las llantas con los motores. Se
colocan los dos motores DC en bases metálicas y una relación de cadena y piñón
doble como se observa en la Figura 7, sección derecha.


Figura 9: Sección izquierda; bases para motores, soporte y batería. Sección
derecha; relación doble de cadena y piñoneria. Fuente:(Elaboración Propia).
Procesamiento de las señales del celular y sistema de potencia
La aplicación móvil se desarrolló con la herramienta Android Studio, la cual es
un entorno de desarrollo integrado (IDE, por sus siglas en Inglés) que permite
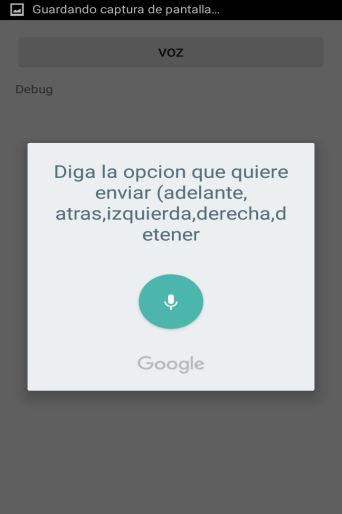
crear aplicaciones para el sistema operativo Android. En la Figura 8, parte (a),
se puede observar el diagrama de flujo que sigue la aplicación para gestionar el
envío de los datos al módulo Wi-Fi y sistema Arduino de la silla de ruedas. En
la Figura 8 parte (b) se observan los pantallazos de la aplicación desarrollada
en Android. El pantallazo inicial que permite establecer cual será el tipo de
manejo que se realizará sobre el prototipo, por panel táctil, por voz o por
programación de ruta. La pantalla de programación de ruta permite hacer un
dibujo de la ruta a seguir por la silla (fase que se encuentra en desarrollo y
que permitirá en un futuro que la silla se movilice usando un mapa
arquitectónico del lugar). La pantalla de comandos por voz usa las librerias
internas de android para gestionar la identificación de tres palabras; adelante,
atrás, izquierda, derecha y detener y realizar el envío de los datos al sistema
Arduino.

(a)



(b)
Figura 10: Parte (a); diagrama de flujo del proceso de envío de datos desde la
aplicación móvil. Parte (b); pantallas de la aplicación en Android.
Fuente:(Elaboración Propia).
La pantalla de panel táctil usa el mismo entorno gráfico de la pantalla de ruta,
pero con la diferencia que ésta lee toda la pantalla y permite al usuario
deslizar el dedo hacia adelante, atrás, izquierda o derecha sin la necesidad de
observar la pantalla y la instrucción de detener es cuando el usuario levanta el
dedo del panel táctil del celular.
Para la etapa de procesamiento se utilizó un dispositivo Arduino MEGA 2560 de la
empresa de hardware libre Arduino, el cual es programado para procesar las
señales provenientes del celular a través del módulo Wi-Fi CC3000 de la Texas
Instruments. Como se observa en la Figura 11, el Arduino inicializa el módulo
Wi-Fi con los datos de conexión a la red y espera la detección de comandos
provenientes del celular. Una vez son procesados los comandos, el Arduino envía
las señales de control al puente H para ejecutar los movimientos de la silla.

Figura 11: Diagrama de flujo de la recepción de datos por parte del sistema
Arduino. Fuente:(Elaboración Propia).
El circuito de potencia está conformado por 4 relés (12V – 40 Amp), encargados
de polarizar los motores de acuerdo a las órdenes enviadas por el Arduino, cada
motor maneja 12 voltios y 15 amperios. Los transistores Mosfet reciben la señal
de PWM (Pulse Wide Modulation, por sus siglas en Inglés) enviada por el
microcontrolador del Arduino para conmutar los motores y poder controlar la
velocidad de éstos, cabe mencionar que la variación de la velocidad de los
motores se distribuye linealmente con valores de comando entre 0 y 255. Esta
etapa es robusta debido a la cantidad de corriente que se maneja. El circuito se
observa en la Figura 12, donde las flechas izquierda y derecha controlan la
dirección de cada motor, asegurando un estado lógico bajo en la flecha que no se
usará y un estado lógico alto en la flecha a usar.
Los terminales que tienen polarización son los que proveen la energía al
circuito de una batería de 12V, 600 Ah. Los terminales marcados como PWM son los
que controlan la activación del circuito puente H, por lo que tienen la función
“enable” para asignar una modulación por ancho de pulsos en la activación de
cada motor para regular la velocidad.

Figura 12: Esquema circuito puente H. Fuente:(Elaboración Propia).
Todas las señales provenientes del Arduino (que se conecta a las terminales de
control del sistema de potencia M1, M2, y PWM) y su direccionamiento se gestiona
a través del circuito de distribución como se puede observar en la Figura 13.

Figura 13 Esquema circuito tarjeta de distribución Fuente:(Elaboración Propia).
- CONCLUSIONES
Dentro de los resultados de la investigación, que corresponden a seis meses de
trabajo se presentan los siguientes resultados;
Se desarrolló una aplicación para sistemas Android que permite enviar datos
de control por voz, panel táctil y programación de ruta a un módulo de Wi-Fi
y al sistema Arduino para manipular la silla de ruedas.Se utilizó la interface de desarrollo de Android Studio para hacer la
programación de los componentes del aplicativo, la etapa de control por voz
utiliza una api que depende de la versión instalada del sistema operativo
Android, para las demás etapas se utilizaron clases internas de java
compatibles con Android.Se diseñó un circuito de potencia que articula un puente h y un PWM para
manejar la dirección y velocidad de los motores. También se adiciona el
diseño del circuito de tarjeta de distribución de señales de entrada y
salida al prototipo de silla de ruedas.Se presenta el prototipo de silla de ruedas con una estructura mecánica que
presenta un acople de paneles solares, un sistema de sensores de proximidad
ultrasónicos, un mando joystick y un ajuste del sistema de piñoneria y
cadena doble que permite darle más fuerza al movimiento de las ruedas.La conexión con el módulo WIFI Arduino cc3000 presento problemas de
conectividad, los datos enviados desde cualquier dispositivo (PC, MOVIL) no
fueron recibidos en un 100%, esto puede deberse a múltiples cuestiones, las
principales tales como, distancia del dispositivo al punto de conexión WIFI,
la configuración del router o modulo que provee de WIFI al módulo, esta
última puede bloquear la comunicación directa con el modulo.