Teleoperation Systems.
Teleoperation System: A Teleoperation system, defined as the extension of sensory capabilities and human skills to a remote location, is described as a process formed by a master system, represented by an operator that is responsible for generating movement commands, through a series of input and output interfaces, these commands are transmitted by some means of communication to a remote slave system, formed by a set of sensors and actuators that give relevant information of the environment, and replicate the movement that the operator wishes.
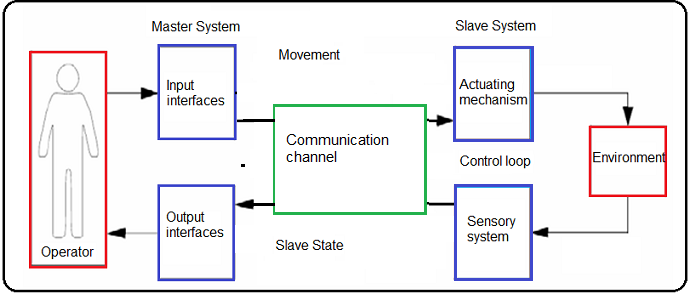
Figure 1. Gómez de Gabriel, J. M., Ollero Baturone, A., García Cerezo, A., “Teleoperación y Telerrobótica”, Pearson Educación S.A.
The general scheme of a Teleoperation system consists of five elements that we will define next:
Operator or Teleoperator: Is the person who performs remote Teleoperación control. The action of the operator can go from a continuous control to an intermittent intervention, with which only monitor and indicate objectives and plans every certain time.
In Teleoperation, the operator can act directly on the actuator mechanisms or by the specification of commands, tasks and objectives which could be performed autonomously by the teleoperated mechanism. The operator plays different roles, for example in cases of unstructured and dynamic environments where there are problems of perception and automatic planning, its intervention is usually unavoidable, but in cases where the slave system covers routine tasks with well-defined environments, the operator passes to a more external role in Teleoperation and the slave system increases its autonomy.

Figure 2. Qiyuan, Sun and Xuan, “Web-based Control System of a Mobile Manipulator over Internet”. First International Conference on Intelligent Networks and Intelligent Systems.
Master System: It is a set of devices that allow the interaction of the operator with the Teleoperation system. The master manipulator is considered as the interface, which allows the operator to visualize what appears in the environment, of the system that is required to be manipulated. The master system is supported by devices such as videos, audios, touch sensors, force sensors, position sensors, joysticks or any other device that allows the operator to send information to the system and receive information from it.

Figure 3. Tobias Ortmaier. Telesurgical Robot Systems - Part I & II. Institute of Robotics and Mechatronics German Aerospace Center (DLR) Munich-Oberpfaffenhofen Germany.
Communication channels: Set of devices that modulate, transfer and adapt the signals that are transmitted between the remote and the local area. These communication systems use different technologies to transmit data between both schemes, communication systems are functions that depend on time and are seriously affected by disturbances that are reflected, such as delay times. Very pronounced delays can destabilize Teleoperation.
Currently, the Teleoperation systems present an increase in applications that use the Internet as a means of communication, allowing the control of a slave system, from any point of the planet without the need for special equipment, this is possible if Web technologies are used, which they allow access to send and receive information through standard languages and tools that were initially created for other uses.

Figure 4. Own elaboration.
Slave System: It can be a manipulator, a robot, a vehicle or similar device. It is the machine that works in the remote area and that is being controlled by the operator. The slave system can depend exclusively on the decisions made by the operator or it can have autonomy to decide its actions. The slave system is accompanied by a set of devices and mechanisms that collect the information to be used by the interface and obey the control slogans of the master system.

Figure 5. Tobias Ortmaier. Telesurgical Robot Systems - Part I & II. Institute of Robotics and Mechatronics German Aerospace Center (DLR) Munich-Oberpfaffenhofen Germany.
Environment: It is the medium that interacts with the slave system, the environment involves the slave manipulator and must be recognized by the master system through the sensor devices, to make the action decisions of a robot, a vehicle or similar device.

Figure 6. Backes, P. G., Tso, K. S., and Tharp, G. K., “Mars Pathfinder Mission Internet-Based Operations Using WITS”, Proceedings of International Conference on Robotics and Automation.
Telerobotic control in Teleoperation systems: Telerobotics is an advanced form of Teleoperation, where technologies that include remote monitoring and reprogramming of a robot by a person are grouped, and giving autonomy to the controlled mechanism to act reducing the intervention of the human operator. There are different control strategies in Telerobotic:
- Direct Control: The human operator closes all control loops through a master device, the remote robot, only follows the orders of the human operator.
- Shared Control: The mission of Teleoperation is divided into progress tasks. The operator and control on board the teleoperated robot carry out different tasks at the same time.
- Supervisory control: It is a more widely adopted scheme, high level control commands are issued from the operator and are executed by the remote subsystem, the operator and the remote environment are decoupled and avoid changing responsibilities of detection and control to the operator, in this way, the load on the communication link is reduced.
- Autonomous Control: The operator is located outside the control loops, the Teleoperation mission is executed mostly without the help of a human operator.
Interfaces to improve Teleoperation:
- Haptic interfaces: They are devices that provide a sense of strength and touch to the operator, increase the sensation of immersion of the operator in the remote system. Within the haptic interfaces we can mention the tactile interfaces that provide information to the operator of the relief and texture of the environment:
- Augmented Reality: Situation or circumstance perceived by an operator when the sensory information that is fed back from an environment is modified previously by a computer in order to add new artificially created information.
- Visualization: It is related to the video technology used to restore the Teleoperation process, it includes, among other things, the characteristics and control of the cameras and lighting.
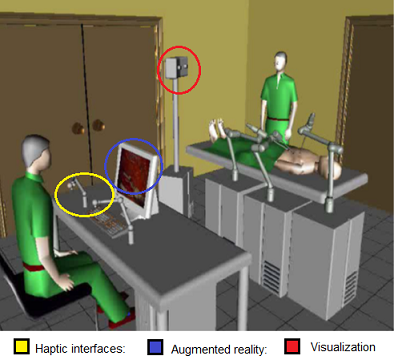
Figure 7. Tobias Ortmaier. Telesurgical Robot Systems - Part I & II. Institute of Robotics and Mechatronics German Aerospace Center (DLR) Munich-Oberpfaffenhofen Germany.
Web Teleoperation: Web teleoperation uses the Internet as a communication channel, establishing a flow of information between the master and the slave in a global way, since the means of communication is made up of a global access network. Teleoperation using the Web is adapted to a client server architecture, where the master system is equivalent to the client and the slave system to the server that must be in contact with the robot or the environment. One of the most significant problems that Web Teleoperation has is the non-deterministic delays of the communication network, which makes it impossible to establish a model that simulates the delay and techniques must be applied to ensure stability with variable time delays.
The following image shows a web Teleoperation, based on a mobile robot controlled wirelessly by a server computer, which is also controlled remotely by a client computer through the internet.
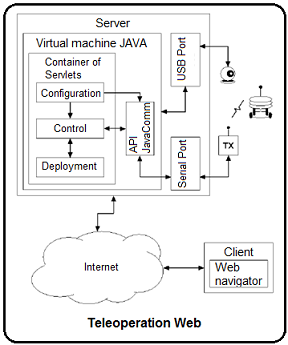
Figure 8. Nelson David Muñoz C, Néstor Alfonso Delgado Hernández y Maribel Arroyave. “Sistema de Teleoperación de Robots basados en Internet”.
Te dejo mi granito desde el topfive de #Steemfamilyhi.
Aunque no es mi fuerte me parece muy completo tu artículos. Saludos!
excelente informacion amigo mi apoyo desde el top five steemfamilyhi
Saludos! Mi Apoyo Top Five #steemfamilyhi
Mi voto top5 steemfamilyhi
Este post es apoyado por el trial de steemfamilyhi
#jga #angeluswins #uniazul #hendersonp
Si quieres unirte al trial búscanos en steemauto / curation trial ----- steemfamilyhi
Mi Apoyo #TopFive Tiene una excelente informaciòn gracias la comunicaciòn es importante
Congratulations @edagmi! You have completed some achievement on Steemit and have been rewarded with new badge(s) :
Click on any badge to view your own Board of Honor on SteemitBoard.
To support your work, I also upvoted your post!
For more information about SteemitBoard, click here
If you no longer want to receive notifications, reply to this comment with the word
STOPMi Proyecto Personal de Curación, #TopFive los cinco y otros más. [24/04/2018]
Mi Proyecto Personal de Curación, #TopFive los cinco y otros más. [24/04/2018]
Buen Post, @edagmi, Saludos
