ECONOMIC VALUE OF ROBOTICS AS (STEM) AND THE HUMAN EFFECT

Robotics as become the fast growing invention in the world due to it special feature or ability to do the Job of human beings, most organization now take over jobs from human being and a located it to robot, robotics as grown to the level of becoming a secretary in an organization, security personnel, monitoring tools,military, factory worker,receptionist, house maid and even as a sex partner for both male and female, very funny I most say. Infact i will say that robot is an artificial human being klown by man But the major issue is that what happen to human being if robot take over all the Job that was meant for man, who will human being maintain their well being, will it affect human or not?
Let dig a little into robotic
ROBOTICS is an interdisciplinary branch of engineering, and science that includes mechanical engineering, electronics engineering, computer science, mathematics and others, it deal with the design, construction, operations and use of robots as well as computer system for their control, sensory feedback and information processing.
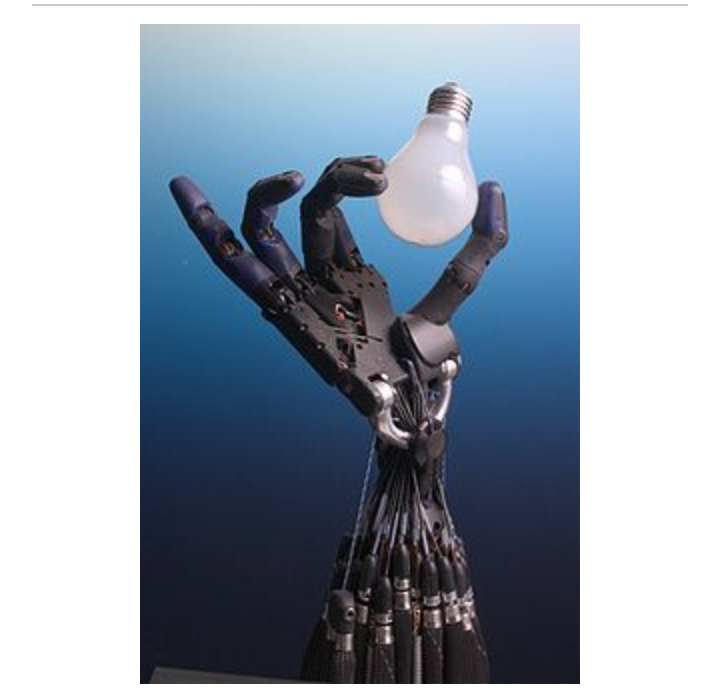
ROBOTS ANATOMY robot like humans are made up of four major parts
- THE HAND/END EFFECTOR
- THE ARM AND WRIST SYSTEM
- DRIVE SYSTEM
- CONTROL/MEMORY SYSTEM
example of hand /end effector: this help to carry out specific function like grippers, manipulations, mechanical hooks,pick ups, magnetic grippers, touches, gums,spray cams, welding heads, soulding heads, etc.
example of arm and wrist system: this help to give the degree of freedom which started from 2 to 9 degree of freedom, 4 is the degree of freedom that pass xyz, if can turn and work and do most of the things human being do.
example of drive system: drive have three major element that is used to carryout it specific duties
i) Electro Mechanical Push or Motors System Drive is what causes it to move similarly in robot, EMP are also used in mail, it can as well be used in doing hard job e.g MASSENGER ROBOT, this robot can be charge to gain power.
ii) Pneumatic System or Air Driven has a driven forces which is by air, if air is reduce it stop or slow but if air is high it work faster.
example of hydraulic system: in this robot there is a kind of liquid whose temperature is used to decrease when force is applied to it, it is usually found in industrial sector for heavy duty.
example of control and memory system: it is subdivided into three part
i) Non servor system: NSS is programity, there are robot with limited sequence of duty to performed with limited track.
ii) The servor with point to point: this care of feedback, it has a way of increasing is speed, it is programmable and can change it direction.
iii) The servor with continuous path: it is very programmable with a large memory, it learn in the process of it duties e.g practise, it keep track of every thing it does with date and time.

CHARACTERISTIC
robot has two specific characteristics which are hand effector and drive system
PROBLEM IN ROBOT
1i) The have problem of sense and vision
ii) They have rudimentary sense and vision
iii) Their sense is not balance and it is not very powerful
- Multiple hands coordination: if their hand is not being coordinate, if a problem in which part, they can cross each order.
- Sense Interpretation: Robot can not interpret a sense of touch if it bullet or just normal touch.
- Robot mobility, power comsuption, load capacity.
In power consumption if a load weight 100% then the robot that will be used should also be 100% while in load capacity it take high power. - Voice recognition: should be able to differentiate the voice of the master from a voice of a visitor.
APPLICATION OF ROBOT
- Robot are applied in hazardous environment and also areas of perfect accuracy and precision is needed.
- it's apply in assembling and manufacturing, welding, process control spraying etc.
Three basic factor which are involved in manufacturing of robot
- The shape for which it most take mostly are rectangular, cylindrical or spherical.
- Design: it has to do with the logic of it specific task.
- Dynamics: it governed movement under dynamics where are velocity and the acceleration and balance which all sum to their momentum.
Thanks for reading this research
Do well to upvote me@uty01
Best Regard
smoking trees or eating bee's?
Hi uty01.
You did a cool job. But there are some areas I'd love to advise you on.
Thanks and cheers
Thank so much,I will do that in my next post