AI software on Mars rover Curiosity has proved its effectiveness
NASA and team of researchers from US, Denmark and France reported performance results of their software, called Autonomous Exploration for Gathering Increased Science (AEGIS). It was tested and then uploaded to Curiosity in May of 2016 and was used 54 times over the next 11 months. The report describes first field results of the artificial intellect, choosing samples for further studies.

First rovers outside of Earth were two Soviet Lunokhod machine, which studied Moon in the 1970th. They were directly driven by operators in Mission Control Center. It was possible because radiowaves reach the Moon in 3 seconds, so delays were neglectable.
Mars rovers operate at great distances and communication delays are measured in tens of minutes. So, working traditional way, a robot would have to scan a region, photograph it, send the photographic images back to Earth and then wait for instructions on what to do. Waiting times waste rover's scarce resources and shorten its lifetime. With AEGIS, a rover such as Curiosity could scan the horizon, pick an object to study and then drive over and study it. This approach would save a lot of time, allowing the robot to study more objects before its useful lifespan expires.
The AEGIS selects targets for the ChemCam remote geochemical spectrometer instrument. AEGIS operates in two modes:
- Autonomous target selection - it identifies geological targets in images from the rover's navigation cameras, choosing for itself targets that match the parameters specified by mission scientists the most, and immediately measures them with ChemCam, without Earth in the loop.
- Autonomous pointing refinement - the system corrects small pointing errors on the order of a few milliradians in observations targeted by operators on Earth, allowing very small features to be observed reliably on the first attempt
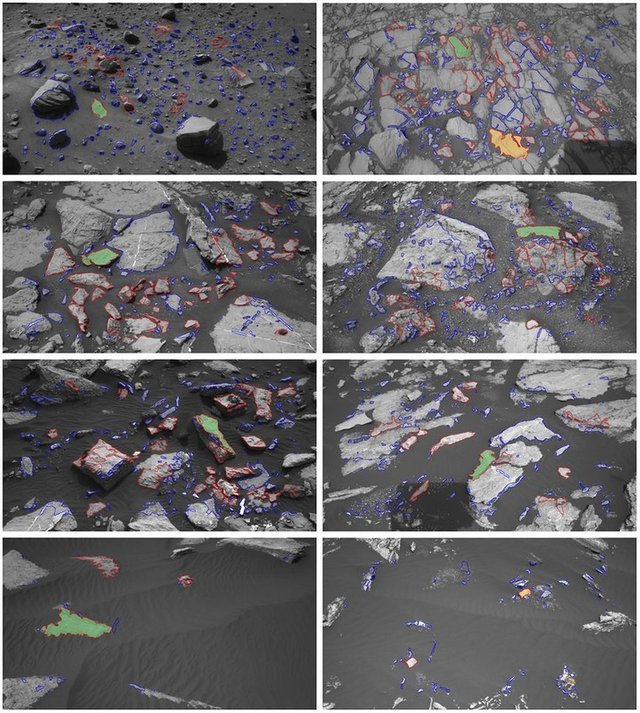
Image: Francis et al., Sci. Robot. 2, eaan4582 (2017) - Mode 1: target selection, collected from Martian day 1400 to 1660. Targets outlined in blue were rejected; those outlined in red were retained. Top-ranked targets are shaded green, and second-ranked targets are shaded orange
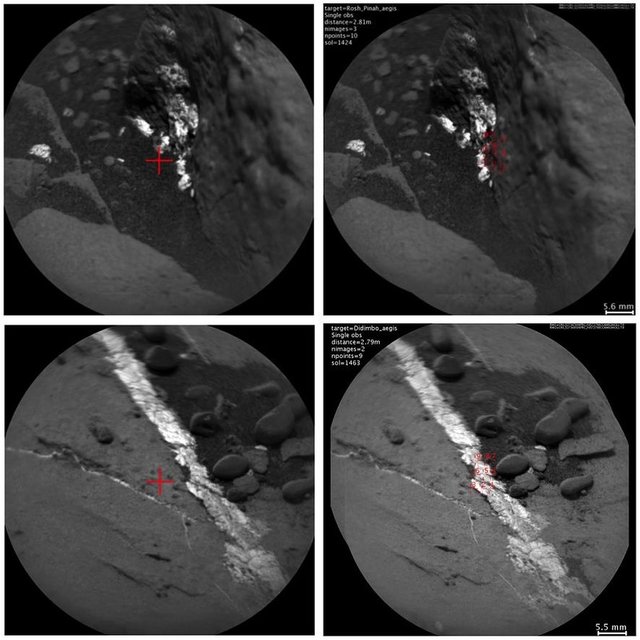
Image: Francis et al., Sci. Robot. 2, eaan4582 (2017) - Mode 2: Autonomous pointing refinement. Fixing human commands that miss the mark (A, C) Human-calculated targets in red. (B, D) Target refinement by AEGIS indicated in red.
Taking only 21,000 of the Curiosity mission’s total 3.8 million lines of code, AEGIS accurately selected desired targets over 2.5 kilometers of unexplored Martian terrain 93% of the time, compared to the 24% expected without the software. In this case, the desired target was outcrop, a type of Martian rock that’s ideal for analyzing the red planet’s geological history.
The results are encouraging: AEGIS allowed for an increase in ChemCam targeting from 256 per day to 327. Next rover, Mars 2020 will have updated AEGIS with many additional AI functions.
Next generations of rovers and drones, designed for Jupiter's and Saturn will have full scale AI, controlling all systems. Their communication with Earth will limited by transmitting results.
Source: http://robotics.sciencemag.org/content/2/7/eaan4582.full
Really well written article man! Keep up the good stuff. Also what are your thoughts on private citizens establishing mining expeditions in space?
Trank you for the reading! As to space mining, it is great but yet too early. That is, before gold rush in California and diamond rush in South Africa, railroads were built first. So we need cheap rockets and industry in space first - I think, resources should not be sent back to Earth, instead they will be processed in space. Real decentralization is here. I hope our children will see it
I fully agree my friend.