Scientists Observe Flying Insects To Create Smaller Flying Machines
The object of the flying insect robot is to make a fully autonomous swarm of flying robots for uses such as search and rescue and artificial pollination. To make this practicable, researchers need to figure out how to get power supply and decision making functions, which are currently supplied to the robot via a tiny tether, on board.
Inspired by the flying ability of flies, robots such as coin-sized robots can help researchers with better fly insect details.
Fly can easily avoid fly swatter, can also stop in the wind swaying objects on the surface. Some studies show that tiny changes in insect wings can produce enough twisting motions to allow them to turn quickly. In the lab, scientists started making robots that mimic insect flights. Although this can better understand the details of insect flights, it is actually very difficult to do.

The best-performing flying robot wing flaps 120 swipes per second, almost like a real fly.
source
Although not involved in the trial, Michael Dickinson, a bioengineer at Washington University in Seattle, said: "People have been trying to build such flapping machines for years."
According to flight dynamics, drag and friction have a large effect on small-scale components. As a result, many large robot components, such as gears and pulleys, are not suitable for use with micro-aircraft.
Robert Wood and colleagues at Harvard University had to improvise components to enhance the performance of the miniature flying robot's trunk, wings and flying muscles. They apply piezoelectric materials to the flying muscles, which means that the material can expand and contract as the magnetic field changes. The researchers planted two groups of flying muscles on the carbon fiber skeleton, attaching them to the top of the skeleton by plastic hinges, each with only as small a coin.
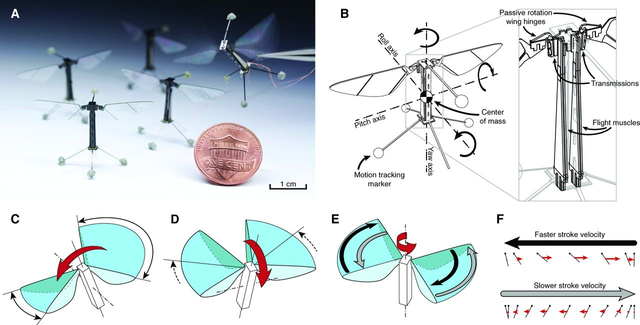
A robotic fly design with a pair of independently actuated wings enables precise control of torques about three orthogonal axes.
(A) Five individual robotic flies of identical design are shown alongside a U.S. penny for scale, demonstrating that the manufacturing process facilitates repeatability and mass production. (B) Body axes definitions. The inset identifies key elements of the robot design and illustrates how each wing is independently driven by a separate flight muscle. (C) Roll torque is generated by flapping one wing with larger stroke amplitude than the other. (D) Pitch torque is generated by moving the mean stroke angle of both wings forward or backward to offset the thrust vector away from the center of mass. (E) To generate yaw torques, the robot influences wing drag forces by cyclically modulating stroke velocity in a “split-cycle” scheme rather than tilting the stroke plane or altering wing angle of attack . (F) The effect of stroke velocity on a wing’s drag force. Black lines indicate the wings’ position and pitch angle at temporally equidistant points within the stroke cycle. The red arrows indicate the instantaneous drag force on the wing.
source
Oscillating the electric field causes the piezoelectric muscle to contract and flap the wings. By changing the strength or frequency of the electric field, the flying robot can flap its wings at different intensities and frequencies. Researchers write programs that shed light on the information the robot's real-time video conveys and can direct when the wings flap.
It took Wood and his colleagues a decade to get a robot flying. Wood said one night last summer, at 3 a.m., one of his students emailed him and told him "a cool video." Talking about a robotic takeoff, hovering and brief flight process. Since then, researchers have produced countless prototypes that are constantly being improved and tested.
The best performing flying robot wing can tap 120 times in a second, almost like a real fly. The robot needs about 19 Watts of energy, equivalent to the amount of energy the insect is flying in the same size. The researchers said that before the robot crashed, it could circling, fixed forward and backward, stay in the air more than 20 seconds.

Wood pointed out that its main limitation is that these robots do not come with power packs, sensors and controls, so they are always charged. Dickinson also pointed out that compared with the real flies, the wings of the robot wings is not complicated enough sophisticated.
"This is an exciting advance," Dickinson said, "but it also shows that there is a long way to go before engineers create truly autonomous flying robots."
Another concept in flying robots is a BeeRotor which works on the principles of optical flow sensors.
BeeRotor: Flight robot that does not rely on accelerometers
BeeRotor, a flying robot inspired by bee-flying, can fly along uneven terrain and avoid obstacles by installing an Optical Flow Sensor in the "eye" section. Although not measuring gravity and acceleration, the sensor "sees" its geographic location directly.
BeeRotor: Flying robot that does not rely on accelerometers
using optical flow sensor
source
Humans need to balance the body with multiple parts to cooperate, its complexity and precision can not be copied directly to the robot body. Therefore, the robot needs to measure the acceleration of gravity with an accelerometer to obtain its own horizontal and vertical tilt angles so as to maintain the horizon. No matter how rugged terrain, you can balance the gravity.
Although some studies indicate that the flying insects navigate through gravity to sense the direction, in fact, these studies also show that most of these insects fly through the vision control, that is, the optical flow information of the surrounding environment is perceived through the compound retina.
This vision-based perceptual mechanism inspired researcher Fabien Expert and Franck Ruffier of Institut des Sciences du Mouvement Etienne-Jules Marey of the University of Aix Marseille to work together to create BeeRotor, a flying robot inspired by bees.
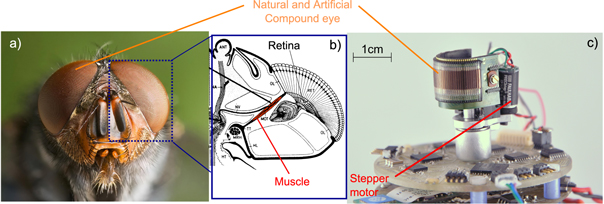
(a) Head of a Calliphora vomitaria (b) Top view of a fly's head showing the orbito-tentorialis muscle (MOT, in red) attached to the back of the head (the fixed part : TT) and the base of the retina (the moving part : RET). The MOT is one of the two muscles responsible for the periodic retinal translation . (c) The active CurvACE with its vibrating mechanism based on the use of a small stepper motor.
source
The robot weighs 80g and is 47cm long. Can fly along uneven terrain and avoid obstacles by installing an Optical Flow Sensor in the "eyes" section. Although not measuring gravity and acceleration, the sensor "sees" its geographic location directly.
To more accurately replicate insects' ability to control their flight by sensing light flow information, the researchers installed 24 photodiodes on the top and bottom of BeeRotor's "eyes," allowing the robot to sense the surroundings. When the robot shoots low pixels, the robot may decide to increase the pixel or reduce the distance of the subject.
In addition, there are three feedback loops constructed using the data collected by the optical flow sensor to navigate the robot. The first is to control the flight level with visual data. Second, control speed by collecting topographic data. The last one is used to maintain balance in order to avoid erratic destructive filming caused by sharp tilting without the accelerometer installed.
The researchers said that these insects also use the feedback loop to navigate like a BeeRotor robot, without using gravity perception. And the theory is also confirmed by biological experiments. At the same time, there are doubts that insects may be navigated using multiple sensing systems, not just gravity or optical flow information. The study also pointed out that in some cases insects can navigate using a "lightweight fail-safe system" or "accelerometer's complementarity mechanism."
The results of the study on "rugged terrain flight movements based on optical flow sensors rather than reference coordinates or accelerometers" will be published in the British professional journal Biometrics and Bioimulation.
References for Text and Images:
- https://www.researchgate.net/profile/Franck_Ruffier
- http://iopscience.iop.org/article/10.1088/1748-3190/10/2/026002
- https://www.popsci.com/tiny-drone-learns-fly-sight-alone
- https://techxplore.com/news/2017-12-tiny-robots-insects.html
- http://science.sciencemag.org/content/340/6132/603.full/
- http://www.robotspacebrain.com/tag/insects/
Support @steemstem and the #steemstem
project - curating and supporting quality STEM
related content on Steemit

Very interesting. A little thing like a flying insect that we often find annoying in our lives, and they are so intricately designed to fly is quite amazing. I had not thought about the mysteries of the insect that much, and now that you have made me aware of such, I will look at these insects with a new sense of wonder and awe in the appreciation of the amazing world we live in.
Science is all about life, observation, theory, practical, inference... The mind of a scientist believes anything is possible. Have you ever wonder where the idea of electric current came from? Check out the lightening and thunder and so much more. Great post
Congratulations! This post has been awarded a 100% upvote by @lottobot! This post was the winner of lottery #1413, which had a total of 1 entries. @lottobot always has a lottery going on! If you would like to nominate a post for the current lottery, just send 0.1 SBD or STEEM to @lottobot, and include the url of the post you would like to nominate as a memo. Learn more by reading the introductory post! Good luck!
This post has received a 0.38 % upvote from @drotto thanks to: @amity123.