Cartografía geológica mediante fotogrametría basada en drones para la exploración de Cobre.
La fotogrametría con drones ha abierto otro punto de vista en la revisión aérea con fines geográficos y mineros. La auditoría escrita muestra un rápido avance en la utilización de los robots en el negocio de la minería, desde la investigación de los minerales hasta la duplicación de la mina. Se aplicó una técnica semiautomatizada para planificar las deficiencias del terreno utilizando un octocóptero de ocho rotores en Piccaninny Point, en la orilla oriental de Tasmania, Australia. La planificación del pozo de la mina y la producción de modelos topográficos en 3D se completó utilizando un cuadricóptero en la mina de Penjamon, Malasia. Se utilizó una mezcla de fotogrametría basada en el suelo y en el robot y de imágenes hiperespectrales VNIR, SWIR y LWIR para obtener vistas generales del terreno más productivas en la cantera de Naundorf, en la localidad minera de Freiberg, Sajonia (Alemania).
El cinturón magmático cenozoico de Kerman (KCMB) cuenta con algunos depósitos de Cu notables de Irán como Sar Cheshmeh, Meiduk y Darrehzar. La mineralización de Cu de tipo pórfido y de vetas está muy extendida en el KCMB. Los almacenes de pórfido de Cu se pueden descubrir debido a sus grandes halos de alteración hidrotermal a través de estudios de teledetección. La mineralización de Cu de tipo vena está limitada geográficamente por deficiencias y roturas que no presentan elementos fantasmas observables para dirigir los exámenes de teledetección. En consecuencia, la vigilancia de los diseños topográficos positivos, por ejemplo, las culpas y las juntas, puede ampliar la posibilidad de prevalecer en el trabajo de campo. Estos lineamientos subyacentes pueden obtenerse con precisión a partir de información algo detectada para establecer un mapa topográfico exacto. Un mapa topográfico con las sutilezas subyacentes puede ayudar a localizar las vetas mineralizadas.
Esta revisión significa dirigir una planificación del terreno de enorme alcance utilizando fotogrametría basada en drones para trabajar con la investigación de minerales en el almacén de Cu de Shahzadeh Abbas. El almacén de Cu de Shahzadeh Abbas está dispuesto a 28 km al este de la enorme mina de pórfido de Cu de Sar Cheshmeh, en la región de Kerman, Irán. La mineralización de Cu de tipo vena se produce en juntas y grietas. La geología de la región de revisión es desagradable, lo que provoca desafíos para el examen de campo y la visión general del terreno. A lo largo de estas líneas, se abrazó la simbología basada en drones para ampliar los aspectos geográficos destacados en un mapa geográfico base.
Materiales y métodos
Los mapas geográficos son una de las necesidades fundamentales de cualquier cruzada de investigación minera. Para la planificación de los mapas geográficos se utiliza, en general, una información algo detectada. Debido a la mineralización de tipo vena, el simbolismo de los drones puede dar imágenes de alto objetivo razonables para determinar la tierra y los datos subyacentes según lo indicado por los objetivos de la investigación mineral. Este examen trata de mostrar la capacidad de los robots para establecer mapas topográficos de base para la investigación de almacenes de Cu de tipo veta. Para llegar al objetivo del examen, se consideraron cinco partes fundamentales, que incluyen (1) el establecimiento de los límites de vuelo y el vuelo del robot, (2) la obtención y el manejo de imágenes, (3) la elaboración de un proyecto de mapa topográfico, (4) la realización de trabajos de campo, y (5) el establecimiento del mapa geográfico.
Tipo de etapa y configuración de vuelo
Las etapas multirrotor comerciales se han utilizado eficazmente para aplicaciones terrestres. En este examen, se utilizó un DJI Phantom 4 Pro V2.0 con sus sensores únicos (Figura 1a). Transporta una cámara CMOS inherente de 1 pulgada y 20 megapíxeles en un cardán.
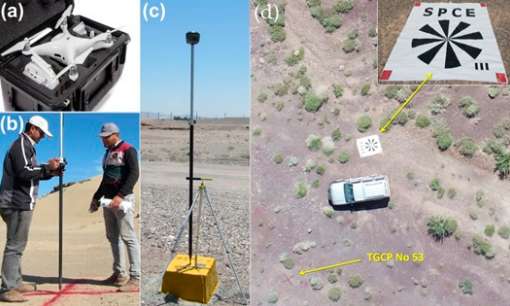
Figura 1. (a) DJI Phantom 4 Pro V2.0, (b) TGCP (marcador), (c) colector SOUTH Galaxy G1+ en un punto de referencia, y (d) objetivo estrella Siemens.
La forma de vuelo se planificó en la programación DJIGo Se aplicó al menos un 70% de cobertura de imagen lateral y un 80% de imagen frontal para tener una exactitud inferior a 5 cm. El vuelo se realizó a una altura de 70 m (velocidad de vuelo de 72 km/h) para cumplir un objetivo espacial de menos de 10 cm. Los demás ajustes del vuelo se realizaron utilizando la aplicación DroneDeploy.
Adquisición y análisis de información
El GPS inherente al DJI Phantom 4 Pro V2.0 sirve para geoetiquetar las imágenes obtenidas para aplicaciones generales. No obstante, es importante un marco de focos de control terrestre impermanentes (TGCPs) o marcadores para trabajar en la precisión de los ajustes matemáticos.
La cantidad de imágenes obtenidas es un componente del tamaño del espacio y del cruce de imágenes. Posteriormente, en el estudio aeronáutico se aplicó la programación Agisoft PhotoScan para el manejo fotogramétrico. La información fundamental, incluidas las imágenes discretas y las áreas de la cámara, se apiló desde el robot hasta el producto para introducir la metodología de la fotogrametría. Se eligió el Sistema Geodésico Mundial de 1984 (WGS84) como punto de referencia. Se utilizaron áreas de cámara y focos de coincidencia para ajustar las imágenes y construir un modelo de nube de puntos inadecuado. El modelo incorpora un conjunto de imágenes discretas ajustadas y debe cambiarse a un modelo de nube de puntos gruesos georreferenciado.
Preparación del mapa topográfico
Los mapas topográficos, con todas las sutilezas que puedan permitirse, pueden ampliar la eficacia de los programas de investigación minera. La simbología basada en drones ofrece datos encomiables para la separación momentánea de la litología antes de emprender la visión general del terreno. En consecuencia, se puede organizar un borrador (primera versión) de la guía de geografía dependiente de los elementos de fotogrametría para ahorrar el tiempo y el coste del trabajo de campo. Suponiendo que el robot esté provisto de un sensor multiespectral o hiperespectral, la planificación mineral puede realizarse sin necesidad de la planificación litológica.
Los minerales y los batidos suelen mostrar reflejos de otro mundo en la zona del infrarrojo de frecuencia corta (SWIR) de la gama electromagnética. Los grupos notables no pueden ofrecer datos imperativos para separar las rocas y los minerales. La cámara CMOS del DJI Phantom 4 Pro V2.0 ofrece imágenes RGB que no se entregan como grupos individuales de azul, verde y rojo. Esta debilidad dificulta la aplicación de técnicas de manipulación de imágenes, aunque estas imágenes de alto valor pueden aplicarse para la planificación de terrenos y subyacentes.
La traducción visual de las imágenes puede realizarse en función de los cambios de sombreado de las unidades rocosas y puede impulsar la segregación esencial de la litología en la región de revisión. De esta manera, se puede entregar la versión principal del mapa topográfico (borrador del mapa geográfico). La precisión del proyecto de mapa geográfico depende de la experiencia del intérprete de imágenes. También se pueden utilizar imágenes de alta calidad para eliminar los puntos de luz de los elementos fotogramétricos. El proyecto de mapa geográfico se termina tras el trabajo de campo principal, pero suele aplicarse para diseñar el examen topográfico posterior.
En este examen, la imagen ortofotográfica se hizo utilizando el modelo de sección transversal para dar el proyecto de mapa topográfico. La imagen ortofotográfica se apiló en la programación de ArcGIS para configurar el proyecto de guía topográfica de la región de revisión. Los polígonos esenciales de las unidades topográficas se hicieron depender de la traducción visual de la imagen ortofotográfica. Estos polígonos se modificaron y concluyeron a raíz de la dirección del trabajo de campo. Dado que las vetas mineralizadas están limitadas por elementos de lineamiento, por ejemplo, culpas y terraplenes, la revisión de las estructuras del terreno es fundamental para la investigación de la mineralización de Cu de tipo vena en el almacén de Shahzadeh Abbas. Por lo tanto, se hizo un modelo de ocultación de la pendiente a partir del modelo DEM en la programación ArcGIS y se aplicó para la extracción de los elementos lineales.
Tipo de mineralización y clave de exploración
El almacén de Shahzadeh Abbas está dispuesto en el KCMB. El distrito ha sido afectado por avances magmáticos en el Eoceno. Las rocas plutónicas son responsables de dar forma a la mineralización de Cu de tipo pórfido y vena. Las grietas y los tizones constituyeron un mecanismo razonable para el curso de los líquidos acuosos y colaboraron con la diseminación de la mineralización de Cu. La mineralización de Cu de tipo veta se ha producido en el depósito de Shahzadeh Abbas. Posteriormente, la determinación de la zona específica de los elementos lineales como las grietas, las juntas y los terraplenes puede ayudar a la prueba de distinción de las zonas mineralizadas en la geología desagradable de la región de revisión.
Logros de los ajustes de vuelo
La disminución de la elevación del vuelo es crucial para el incremento del objetivo espacial para el aseguramiento exacto de los límites del terreno y la posición de las deficiencias. En cualquier caso, amplía la hora de la visión general etérea y la metodología de manejo de imágenes. El objetivo de imagen más alto de los UAVs contrastado con las imágenes de satélite puede provocar que se determinen datos primarios más precisos. El vuelo se realizó a una altura de 70 m. En consecuencia, se determinó el objetivo espacial de 3,26 cm utilizando el objetivo estelar Siemens. Este objetivo espacial cumplía con la precisión necesaria para ilustrar la litología y particularmente los lineamientos geográficos. Se pretendía que las líneas de vuelo tuvieran un 70% de cobertura horizontal y un 80% de cobertura frontal. En la figura 2a, el tono azul exhibe la región con un magnífico cruce de imágenes. Posteriormente, se logró un cruce de imágenes ideal sin agujero en un espacio de 2,02 km2 . Se obtuvieron alrededor de 4018 imágenes para construir el modelo de nube de puntos gruesa. La georreferenciación del modelo de nube de puntos gruesa se refinó utilizando 220 TGCPs (alrededor de un TGCP por hectárea). La figura 2b muestra la difusión de los TGCP en la región de revisión. Se estimó un error cuadrático medio (RMSE) de 2,91 cm para los TGCP. El RMSE de 3,96 cm se adquirió para cinco puntos designados que cumplían la precisión necesaria de menos de 5 cm para la imagen de la ortofoto (ortomosaico).
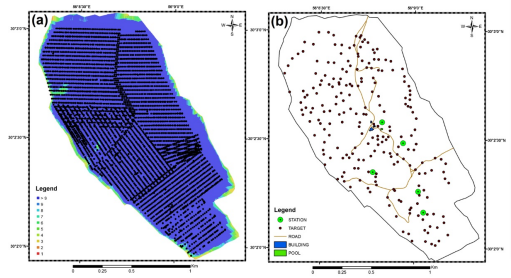
Figura 2. (a) Áreas de la cámara y cruce de imágenes, y (b) difusión de los TGCP en la región de revisión.
Investigación del mapa de ortofotos y del modelo de colina-sombra
La cámara CMOS del DJI Phantom 4 Pro V2.0 es un sensor RGB. La cámara obtiene imágenes RGB que son similares a los compuestos naturales genuinos (TCC) de Landsat ETM+/OLI o Sentinel. Los TCC de los sensores espaciales de objetivo medio se utilizan para la planificación geográfica, pero el objetivo superior de la cámara CMOS ayuda a establecer los aspectos topográficos con mayor precisión.
En la figura 3a se presenta la foto ortográfica obtenida a partir de una nube de puntos gruesa. La imagen proporciona un valioso conocimiento de la litología de la región estudiada. Las unidades de roca se determinaron en función de sus contrastes de sombreado. Los límites de la geografía se han trazado teniendo en cuenta el gran objetivo de la imagen. Los polígonos esenciales de las unidades de roca se dibujaron utilizando la programación de ArcGIS. La imagen de ocultación de la pendiente se utilizó para separar las estructuras lineales para identificar la mineralización de tipo vena. La capa primaria del proyecto de mapa geográfico se organizó utilizando la programación de ArcGIS. La figura 3b muestra el área de los puntos destacados primarios en la región de revisión. Para finalizar el mapa geográfico, se dirigió una revisión geográfica. Teniendo en cuenta el borrador del mapa geográfico, se caracterizó la circunstancia de las pruebas de roca en función de un período y una disposición práctica para lograr el trabajo de campo.
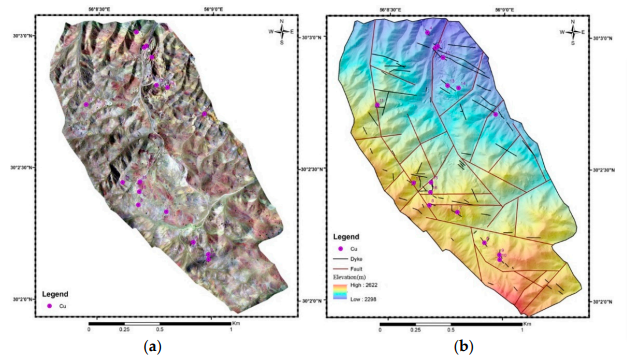
Figura 3. (a) Ortofoto de la región de revisión, y (b) modelo de ocultación de la pendiente que contiene los resaltes de los lineamientos.
Trabajo de campo y finalización del mapa geológico
Durante la revisión del terreno se observaron diferentes afloramientos de rocas fundidas (por ejemplo, andesita, andesita porfídica, andesita basáltica y basalto), rocas piroclásticas (por ejemplo, toba gema, toba lapilli, toba lítica y aglomerado) y sacudidas sedimentarias, por ejemplo, caliza fosilizada. Asimismo, en la región de revisión se pueden encontrar barreras de diversos espesores, que son los principales afloramientos de rocas interferidas.
Las rocas fundidas incorporan basalto, andesita basáltica y andesita que tienen un lugar con ejercicios volcánicos del Eoceno. Estas piedras han pasado comúnmente por un ajuste propilítico. El basalto es en general de color marrón oscuro; la superficie recién rota parece de tenue a oscura (Figura 4a). Los poros están frecuentemente rellenos de minerales auxiliares como la calcita y el cuarzo. El olivino, el piroxeno y la plagioclasa se observan en zonas endebles (Figura 4b,c).
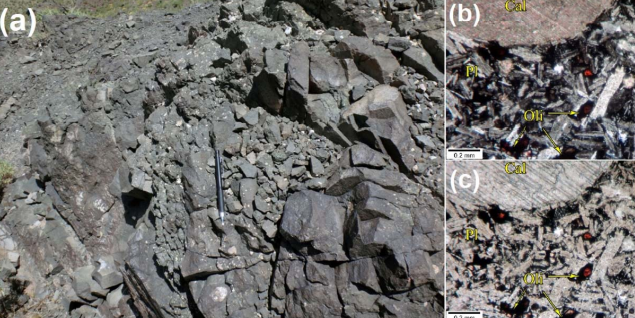
Figura 4. (a) Afloramiento de basalto, (b,c) área endeble muestra minerales de olivino y plagioclasa dentro de calcita auxiliar en los modos XPL y PPL, por separado. Cal: calcita, Oli: olivino, y Pl: plagioclasa.
La figura 5 muestra la guía topográfica de la región de revisión dependiente de la fotogrametría de vuelo y de los estudios geográficos. Los polígonos geográficos esenciales que se dibujaron utilizando la imagen ortofotográfica se modificaron en función de la información del trabajo de campo. Las barreras con mineralización de Cu fueron apartadas en el mapa topográfico para las siguientes etapas del programa de investigación mineral (Figura 5).
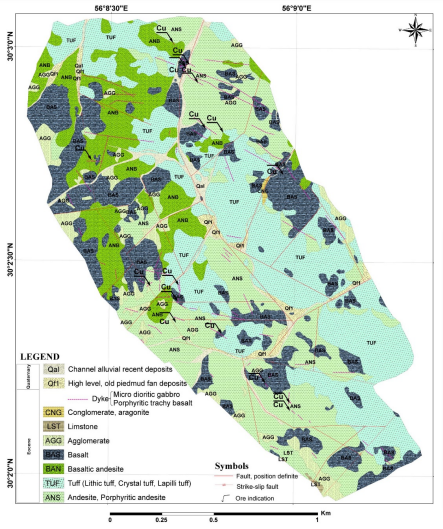
Figura 5. Guía de topografía del depósito de Shahzadeh Abbas.
Para la investigación de la mineralización de Cu de tipo vena, es fundamental proporcionar un mapa topográfico exacto con la exactitud adecuada. Los depósitos de Cu de tipo veta están fundamentalmente limitados por deficiencias y roturas de diversos grosores. Se prescribe un objetivo espacial de unos 5 cm para retratar los lineamientos subyacentes. Se debe considerar una elevación de vuelo de 70 m para cumplir este objetivo. Las ortofotos y los modelos DEM son dos resultados fundamentales de la fotogrametría robótica que se utilizan para extraer unidades topográficas y diseños. La imagen ortofotográfica es adecuada para trazar las unidades topográficas. Los modelos DEM deben cambiarse por el modelo de ocultación de la pendiente para separar los diseños topográficos como las culpas y los terraplenes. Las construcciones topográficas, por ejemplo, las llagas y los terraplenes, deben confirmarse para observar la mineralización de Cu mediante el trabajo de campo. De esta manera, tener el área exacta de los lineamientos primarios es tan vital para ahorrar tiempo y el gasto del trabajo de campo. Se recomienda una exactitud inferior a 5 cm para elaborar el mapa topográfico de base. Para cumplir con esta exactitud, se debe pensar en un 70% de cubiertas laterales y un 80% de cubiertas frontales con una organización de TGCPs. Se prescribe tener no menos de un TGCP por hectárea. Estos ajustes de vuelo permitieron llegar a una precisión de unos 3,96 cm en el depósito de Shahzadeh Abbas. La mineralización de Cu de tipo vena en el almacén de Shahzadeh Abbas se ha producido regularmente en barreras de diabasa. Se propone centrarse en las presas de diabasa en su mayor parte con direcciones noroeste-sudeste en la siguiente fase del programa de investigación. El ajuste acuoso es un elemento geográfico de gran alcance en el KCMB. La identificación de diferentes tipos de modificación es significativa, especialmente para la investigación de los almacenes de pórfido de Cu. Teniendo en cuenta la mayor carga útil del supuesto robot, es factible añadir un sensor con un alcance fantasma más extenso para mejorar las zonas de modificación en los espacios con ajustes geográficos comparativos.